基于地面站辅助的无人机自主架线系统
UAV autonomous stringing system based on ground station assistance
基于地面站辅助的无人机自主架线系统 |
| 陈强,胡士强,罗灵鲲,刘冰,方元 |
|
UAV autonomous stringing system based on ground station assistance |
| Qiang CHEN,Shi-qiang HU,Ling-kun LUO,Bing LIU,Yuan FANG |
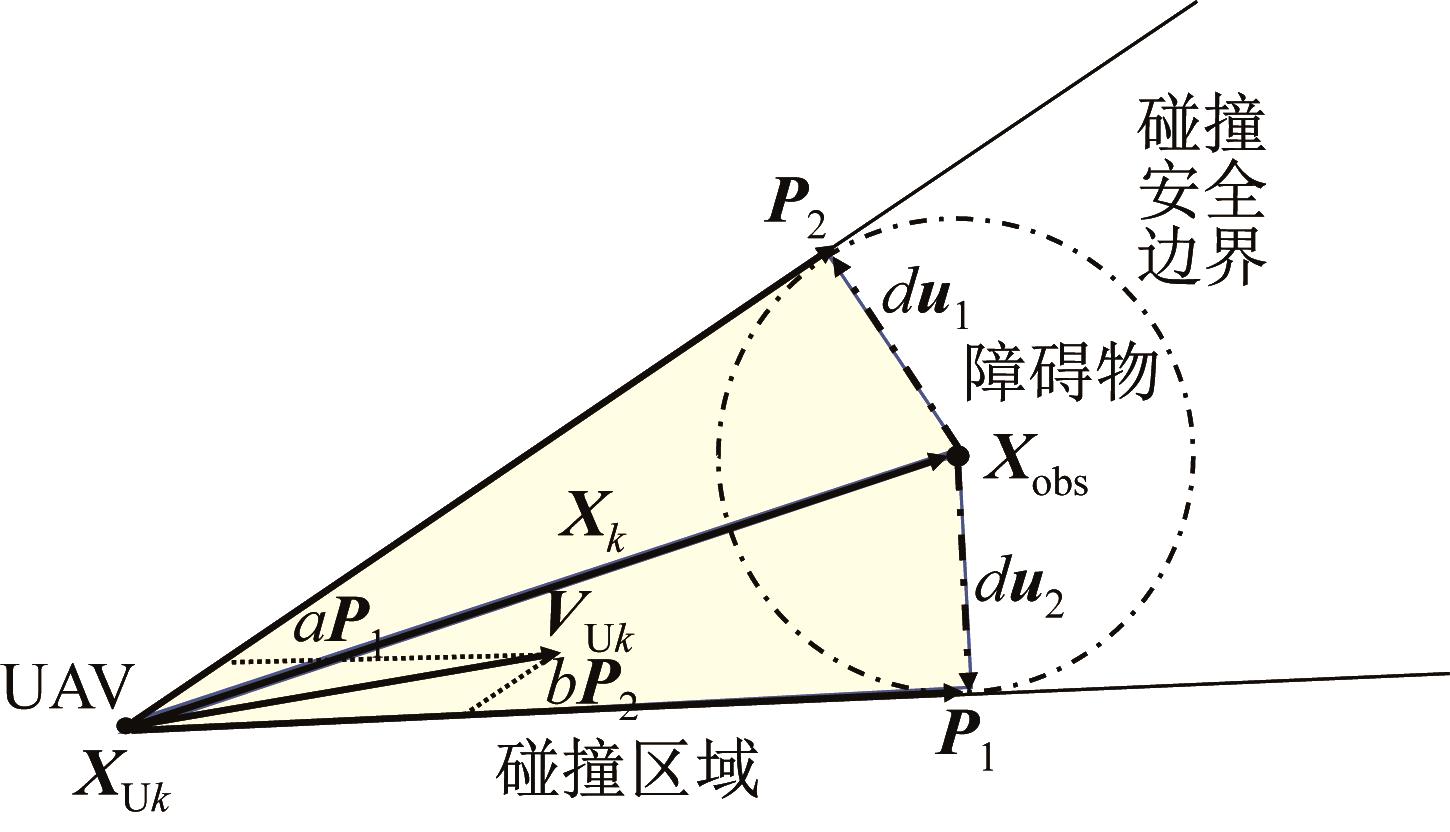
| 图4 障碍物威胁锥模型 |
| Fig.4 Obstacle threat cone model |
|
|