下肢外骨骼助力机器人动力学建模及实验研究
Dynamic modeling and experimental research of lower limb exoskeleton assisted robot
下肢外骨骼助力机器人动力学建模及实验研究 |
| 王月朋,汪步云 |
|
Dynamic modeling and experimental research of lower limb exoskeleton assisted robot |
| Yue-peng WANG,Bu-yun WANG |
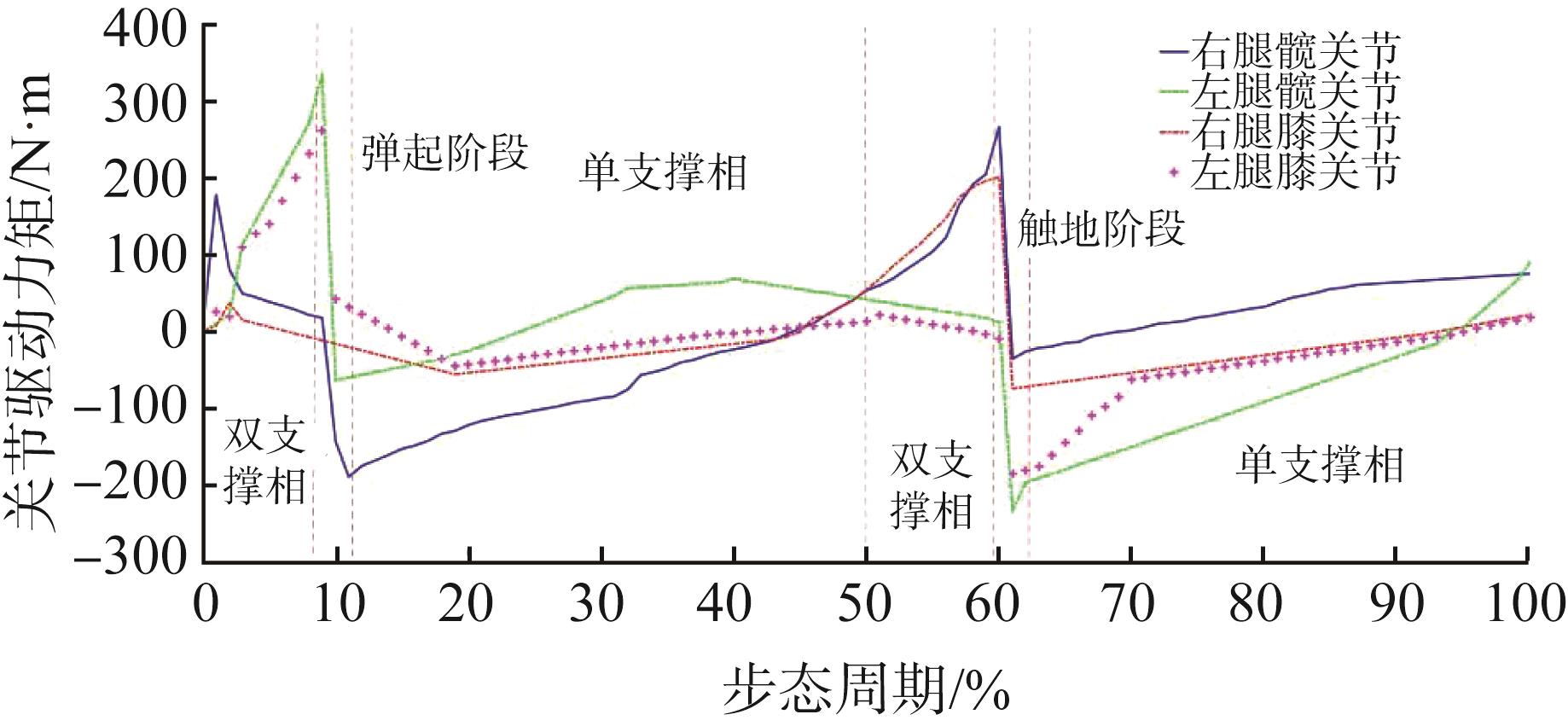
| 图7 单个步态周期内下肢外骨骼助力机器人各关节驱动力矩的理论值 |
| Fig.7 Theoretical values of driving torque of each joint of lower limb exoskeleton assisted robot in a single gait cycle |
|
|