转盘式多足仿生机器人的运动学分析及优化
Kinematics analysis and optimization of rotary multi-legged bionic robot
转盘式多足仿生机器人的运动学分析及优化 |
| 张春燕,丁兵,何志强,杨杰 |
|
Kinematics analysis and optimization of rotary multi-legged bionic robot |
| Chun-yan ZHANG,Bing DING,Zhi-qiang HE,Jie YANG |
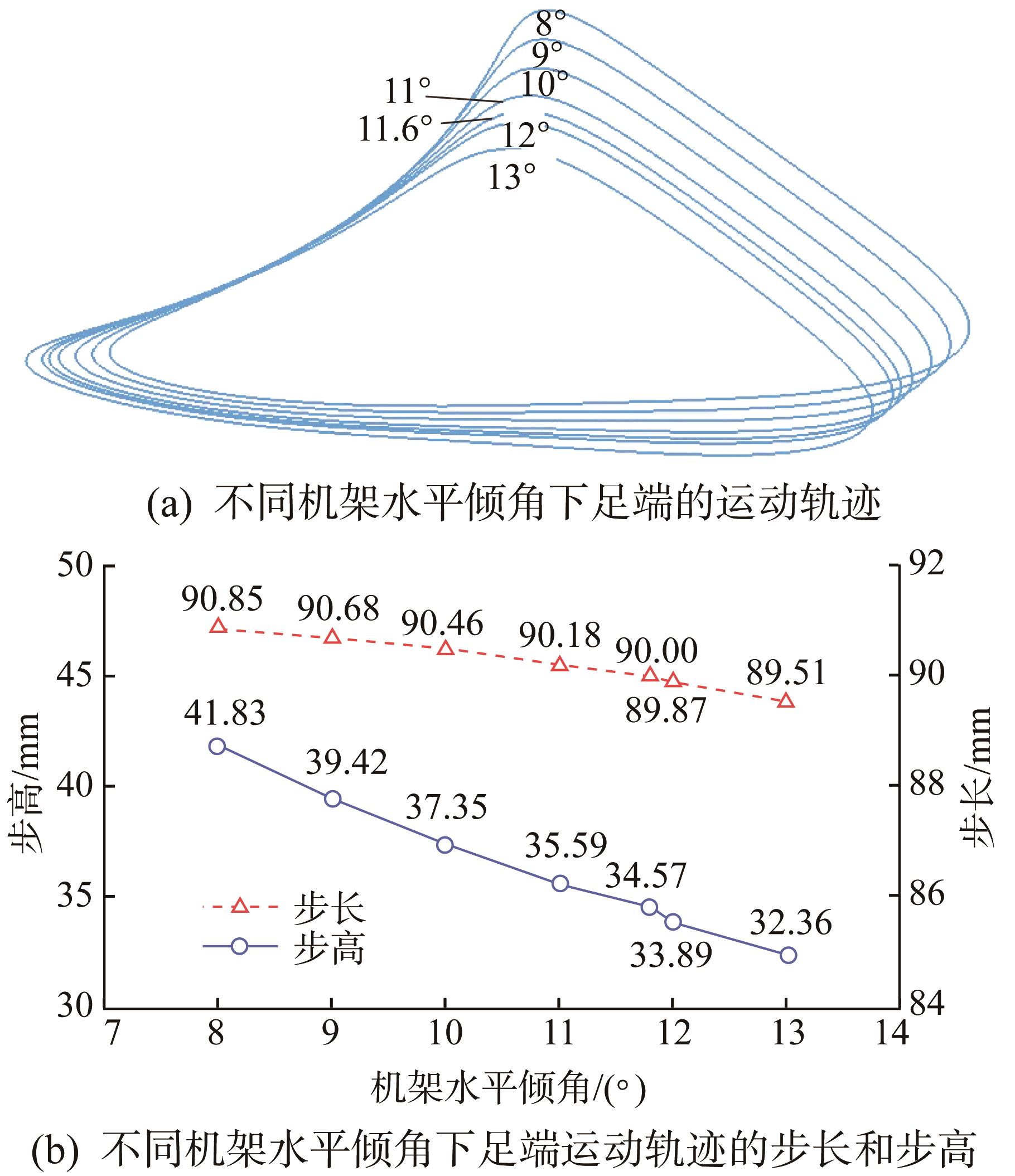
| 图12 不同机架水平倾角下仿生机械腿足端运动轨迹的变化情况 |
| Fig.12 Changes of foot end motion trajectory of bionic mechanical leg under different horizontal inclination angles of frame |
|
|