转盘式多足仿生机器人的运动学分析及优化
Kinematics analysis and optimization of rotary multi-legged bionic robot
转盘式多足仿生机器人的运动学分析及优化 |
| 张春燕,丁兵,何志强,杨杰 |
|
Kinematics analysis and optimization of rotary multi-legged bionic robot |
| Chun-yan ZHANG,Bing DING,Zhi-qiang HE,Jie YANG |
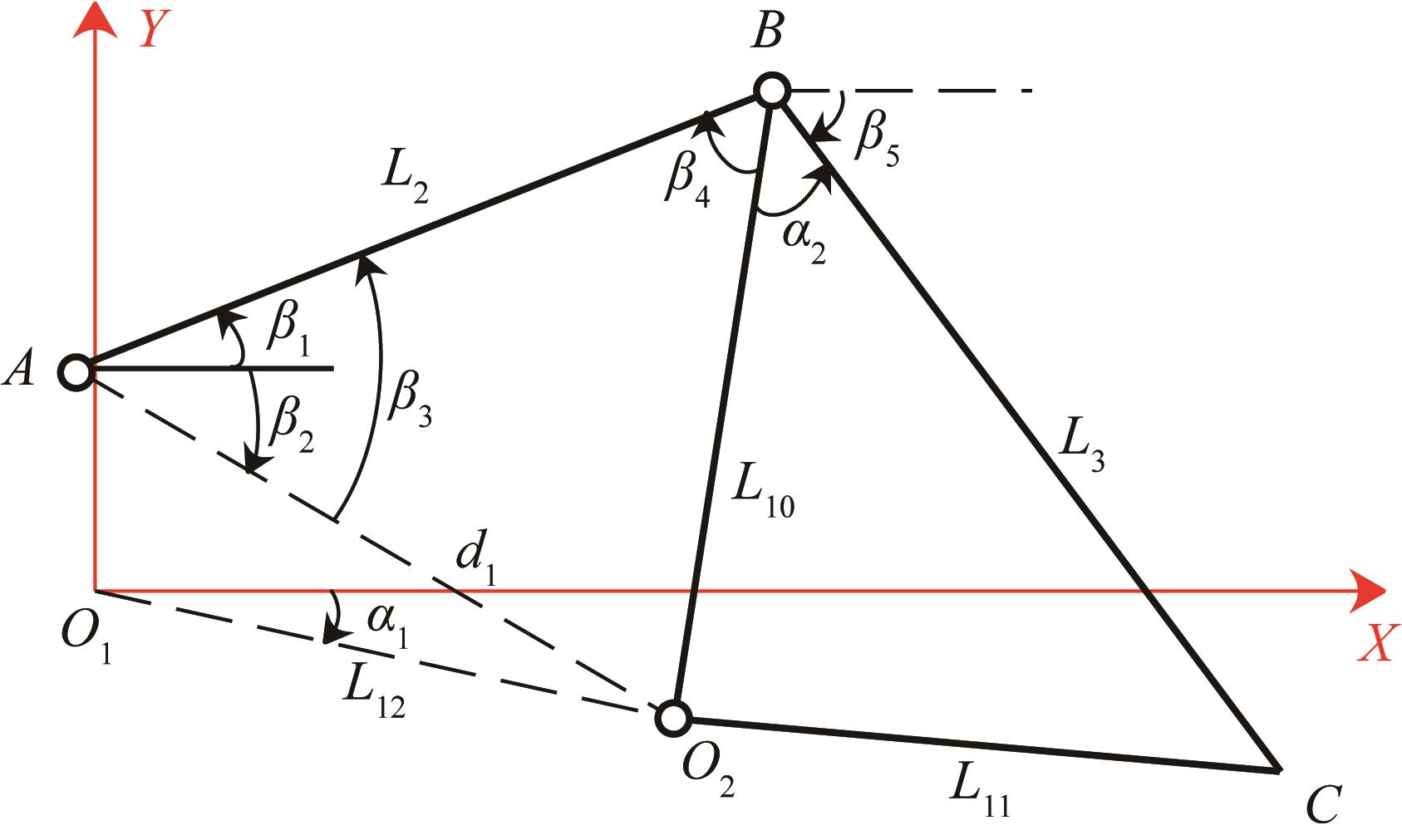
| 图4 固定坐标系中Ⅱ级杆组AB-BO2C的位置示意 |
| Fig.4 Position diagram of class-II rod group AB-BO2C in fixed coordinate system |
|
|