一种工业机器人多目标轨迹优化算法
A multi-objective trajectory optimization algorithm for industrial robot
一种工业机器人多目标轨迹优化算法 |
| 李琴,贾英崎,黄玉峰,李刚,叶闯 |
|
A multi-objective trajectory optimization algorithm for industrial robot |
| Qin LI,Ying-qi JIA,Yu-feng HUANG,Gang LI,Chuang YE |
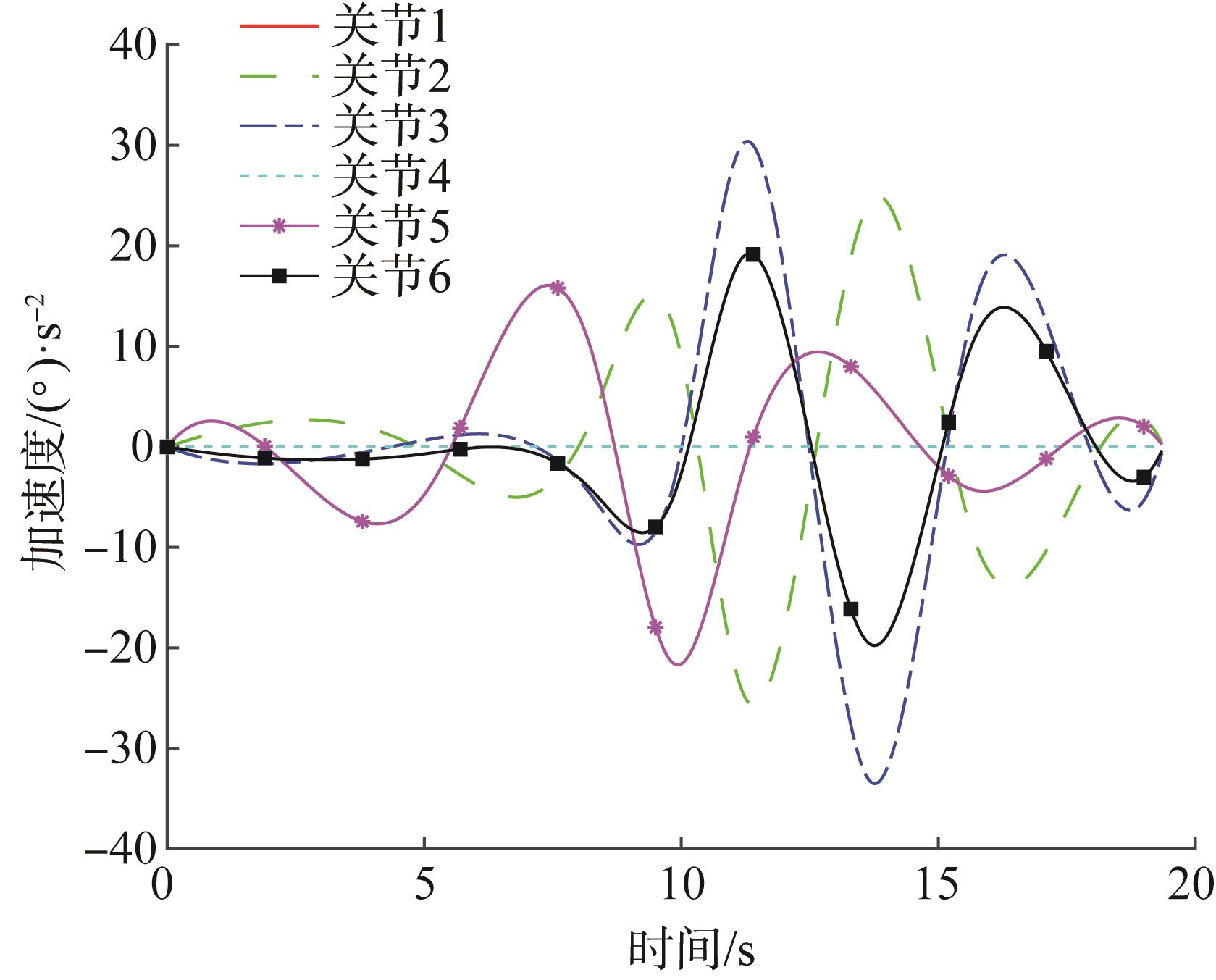
| 图9 6R勃朗特机器人各关节的加速度—时间曲线 |
| Fig.9 Acceleration‒time curve of each joint of 6R Bronte robot |
|
|