


川渝地区是页岩气、天然气的主要产区之一。为了将西南油气田建设成为“西南气大庆”的一个资源开发区,必须加快川渝地区油气资源的开发。川渝地区的地貌以山地、丘陵等复杂地形为主,道路崎岖不平,山路狭窄且陡峭,车载大型油气勘探设备无法到达勘探现场,便携式山地物探钻机已经成为川渝地区油气勘探开发的主要设备[1]。因此,对山地物探钻机的轻量化、模块化和搬运的便利性提出了较高的要求[2-3]。山地物探钻机是一种由柴油发动机和汽油发动机驱动的勘探设备,作业时噪声大[4],尾气排放量大,尾气排放超过了国家规定的排放标准。又由于地形条件的限制及钻机自身较重,钻机搬运不便,钻井作业效率不高,操作人员工作环境差,限制了山地物探钻机的进一步应用。
许多学者对山地物探钻机的结构和性能进行了研究。例如:贺子延等[5]设计了一种轻便气动钻机,由汽油发动机提供动力,钻机各模块质量小于40 kg,总质量为390 kg,采用插接连接、销轴固定的方式,底架安装橡胶罩体以减小尾气对环境的污染,并通过在黄土塬地区的现场实验证明该钻机具有较高的钻井效率;樊慧文等[6]开发了HY-40F新型山地钻机,该钻机分为发动机模块、油泵油箱模块、散热器模块、底座模块、井架及支架模块和动力头模块,相较HY-40钻机,各模块和整机的质量都较小,各模块的质量小于75 kg,整机质量小于350 kg,并通过现场实验证明了钻机性能的可靠性;杨凤申等[7]分别对山地钻机的主机动力结构、井架、滑架以及新型空气压缩机进行了创新设计、优化设计和匹配设计,减小了主机质量(主机动力模块用1台发动机),减少了能量损失,保证了钻机的钻井稳定性和负载能力,提高了钻机的钻井能力[7]。国外研制的山地物探钻机主要有加拿大Canterra公司生产的CT-155/CT-255/256CT-200(主机)/CT-201(气源)型钻机、美国GEOREX公司生产的PT-100型钻机、ARDCO公司生产的HMP-125型钻机、法国Sercel公司生产的TD150S型钻机和新加坡国家地震勘探公司生产的SS-175/SSC-110型钻机等。上述钻机均采用燃油机驱动,整机质量在600 kg以上,且占地面积大,污染严重。其优点为:采用组合框架结构;钻机底座采用摆动架调节,底座支腿采用插销调节,调节均比较方便;底架及井架采用手动快速锁紧机构;皮带张紧结构较为合理[8]。
综上,现有山地物探钻机主要由汽油机和柴油机驱动,单个模块和整机的质量均较大,模块数量较多,拆装、搬运不便,在钻井作业时噪声大、尾气排放严重。为了改变现有山地物探钻机的燃油驱动方式,促进钻机向低噪声、尾气零排放方向发展,笔者提出了山地物探电动钻机模块化设计方案。基于模糊综合评价法和对比法优选适合川渝地区勘探作业的电动钻机的关键部件,采用有限元分析方法进行电动钻机的安全性分析,并开展了现场钻井实验来验证钻机设计的合理性与安全性,以期实现电动钻机低噪声、尾气零排放、轻量化、模块化和便于搬运等的设计目标。
1 山地物探电动钻机模块化设计方案
山地物探电动钻机包括底盘、提升装置、旋转装置、桅杆、导向装置和拉杆等六大部分。其中:底盘是支撑部件;桅杆是受力和导向部件,导向架沿桅杆上下滑动;拉杆用来增强钻机的稳定性。
山地物探电动钻机的设计要求如下:
1)提升装置的最大提升力为7 kN;
2)旋转装置的旋转扭矩为600 N·m,输出转速为120~200 r/min;
3)提升装置和旋转装置均采用电机驱动。
1.1 方案设计
1.1.1 驱动电机
提升装置和旋转装置是钻机的核心部件。提升装置用来控制钻具的提升与下降,提供提升力。旋转装置用来控制钻具的正反转、提供钻头的破岩扭矩及连接与拆卸钻杆和钻具等。提升装置和旋转装置的性能直接影响钻机勘探开发的效率。工业上采用的驱动电机种类繁多,本文选择直流电机、异步电机、永磁同步电机和开关磁阻电机作为钻机备选驱动电机。驱动电机特性的对比如表1所示。
表 1 驱动电机特性对比
Table 1
| 对比项 | 直流电机 | 异步电机 | 永磁同步电机 | 开关磁阻电机 |
|---|---|---|---|---|
| 比功率 | 低 | 中 | 高 | 较高 |
| 峰值效率/% | 85~89 | 94~95 | 95~97 | 90 |
| 负荷效率/% | 80~87 | 90~92 | 85~97 | 78~96 |
| 功率因素/% | 82~85 | 90~93 | 60~65 | |
| 恒功率区 | 1:5 | 1:2.25 | 1:3 | |
| 转速范围/(r/min) | 4 000~6 000 | 12 000~15 000 | 4 000~10 000 | >15 000 |
| 可靠性 | 一般 | 良好 | 好 | 良好 |
| 结构坚固性 | 差 | 好 | 一般 | 良好 |
| 电机外廓与质量 | 大 | 中 | 小 | 小 |
| 电机成本 | 中 | 中 | 高 | 低 |
| 控制操作性能 | 好 | 良好 | 良好 | 良好 |
| 控制器成本 | 低 | 高 | 高 | 中 |
各驱动电机各有优缺点,故下文将通过模糊综合评价法优选适合川渝地区勘探作业的钻机的电机。
1.1.2 传动方式
表 2 传动方式优缺点对比
Table 2
| 传动方式 | 优点 | 缺点 |
|---|---|---|
滚珠丝杠 传动 | 摩擦系数小,传动效率高;启动扭矩接近运转扭矩,传动较平稳;可用调节装置调节间隙,以提高传动精度与刚度;磨损小,寿命长 | 不具备自锁性;制造工艺复杂,成本高 |
涡轮丝杠 传动 | 结构紧凑,体积小,质量小;噪声小,可靠性高;使用方便,使用寿命长 | 提升速度较小,工作效率较低 |
链轮链条 传动 | 结构紧凑,传动效率高,链轮链条对轴和轴承的作用力小;能在温度较高、有油污等恶劣环境下工作;制造和安装精度要求较低 | 传动平稳性较差,运转瞬时速度不稳定;工作时有一定的冲击和噪声;链节距较大,维修成本较高 |
| 带传动 | 带具有弹性,可缓和冲击和振动,传动平稳,无噪声;当过载时,带即在轮上打滑,可防止其他零件损坏;结构简单,安装方便,成本低 | 有滑动,传动比不恒定;带对轴和轴承的作用力较大;带的外廓尺寸较大;寿命较短 |
由表2可知,各传动方式各有优缺点,故下文将通过模糊综合评价法优选传动方式。
1.1.3 减速器
减速器是提升装置和旋转装置的重要部件,其性能直接影响钻井效率。本文选择较适合勘探作业的摆线针轮减速器和涡轮蜗杆减速器作为备选减速器。其性能对比如表3所示。
表 3 减速器性能对比
Table 3
| 对比项 | 摆线针轮减速器 | 涡轮蜗杆减速器 |
|---|---|---|
| 传动比 | 9~87 | 5~80 |
| 体积和质量 | 中 | 小 |
| 过载能力 | 中 | 强 |
| 工作效率/% | 94 | 60~70 |
| 噪声 | 大 | 小 |
| 自锁性 | 好 | |
| 安装和维修复杂度 | 中 | 小 |
| 成本 | 中 | 高 |
由表3可知,涡轮蜗杆减速器的体积、质量和工作中的噪声较小,过载能力较强,且其自锁性能够防止在钻杆提升与下降时由惯性导致的钻机结构的损坏,因而确定涡轮蜗杆减速器为山地物探电动钻机的减速器。
1.1.4 支撑部件
底盘位于电动钻机的底部,在钻机作业过程中对钻机整体起支撑作用,必要时可以在其上放置钻杆以及相应的配重来增加工作钻压。因此,要求底盘具有良好的移运性、可拆装性以及较强的承载能力。鉴于此,将底盘设计成K形和π形两种结构,如图1所示。
图 1
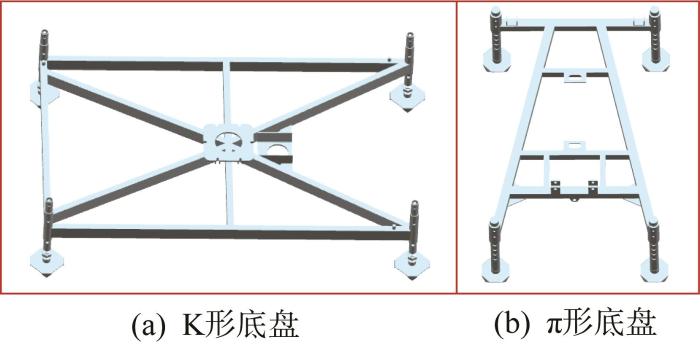
K形底盘由多根矩形管焊接而成。其耗材多,成本高,但整体受力均匀,结构稳定性好。将钻机整体的重心置于底盘中心,底盘与4根拉杆连接,可以增强钻机的稳定性,使其不易倾覆。
π形底盘焊接所用的矩形管较少,成本较低,且留有足够的操作空间便于操作人员拆卸钻杆和钻具。在承载桅杆重量的矩形管与其余2根矩形管的焊接处各增加一块加强板,有助于将钻机整体的重量分散到底盘上,提高底盘的安全性与稳定性。虽然底盘上钻机重心前移,易发生倾覆,但可依靠钻机自身的重量增加一定的钻压。
K形和π形底盘的参数如表4所示。由表可知:π形底盘的外形尺寸和质量均小于K形底盘;与桅杆采用销轴连接,比螺栓连接方便快捷。因此,π形底盘在山地勘探钻井作业时更便于搬运。
表 4 底盘参数
Table 4
| 底盘 | 长×宽×高/ mm×mm×mm | 质量/kg | 与桅杆连接方式 |
|---|---|---|---|
| K形底盘 | 1 600×1 000×180 | 52 | 螺栓连接 |
| π形底盘 | 1 350×900×175 | 32 | 销轴连接 |
综合来看,选择π形底盘为电动钻机的支撑部件。
1.1.5 导向部件
图 2
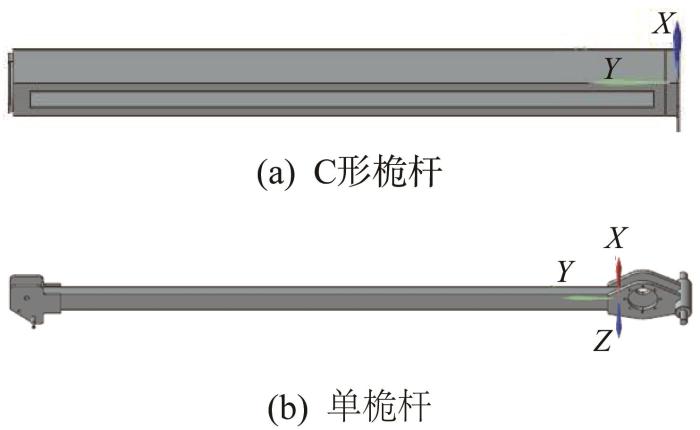
C形桅杆采用内导向设计。导向装置在桅杆内部滑动,桅杆下部焊接矩形板与底盘通过螺栓连接。其密封性好,强度高。
单桅杆采用外导向设计。将桅杆制作成无缝钢管,桅杆底部的圆柱轴端面设计成圆平面,在与底盘锁紧时,桅杆不易发生前摇后晃。钻机无须工作时,能倒置在π形底盘上被运走。
对比C形桅杆与单桅杆可知,单桅杆耗材较少,体积和质量较小,拆装、搬运较方便,更适合川渝地区的油气勘探作业,因此选择单桅杆为电动钻机的导向部件。
1.2 驱动电机和传动方式的确定
1)确定因素论域。
根据电动钻机野外勘探作业情况及驱动电机和传动方式的评价指标,建立影响驱动电机和传动方式的因素集X:
安全性,移运性,经济性}
2)确定权重因子。
根据各因素对驱动电机和传动方式的重要程度,采用层次分析法进行权重分配,各因素的权重因子之和为1。根据钻井工人和相关专家的经验确定驱动电机和传动方式的权重集U:
3)确定评价集。
对各因素进行5个等级的评价,确定评价集V:
4)建立模糊评价矩阵。
逐个对驱动电机和传动方式从各个因素进行量化评价,得到单因素的模糊关系矩阵 R :
式中:m为评价方案的个数;n为评价指标的个数。
邀请4位勘探领域相关专家对每种方案各因素进行评价,得到驱动电机和传动方式的模糊评价矩阵 R1和 R2分别为:
5)模糊综合评判。
利用权重集U和模糊评价矩阵 R1和 R2得到驱动电机和传动方式的模糊综合评价矩阵 B1和B2。
表 5 4种电机的模糊综合评价结果
Table 5
| 方案 | 综合评价得分 | 排序 |
|---|---|---|
| 直流电机 | 0.648 | 4 |
| 异步电机 | 0.735 | 3 |
| 永磁同步电机 | 0.981 | 1 |
| 开关磁阻电机 | 0.747 | 2 |
表 6 4种传动方式的模糊综合评价结果
Table 6
| 方案 | 综合评价得分 | 排序 |
|---|---|---|
| 滚珠丝杠传动 | 0.737 | 3 |
| 涡轮丝杠传动 | 0.715 | 4 |
| 链轮链条传动 | 0.780 | 1 |
| 带传动 | 0.748 | 2 |
2 山地物探电动钻机安全性分析
山地物探电动钻机的作业环境十分恶劣。在多种复杂因素的综合影响下,钻机的受力和运动十分复杂,其工作可靠性降低,甚至可能不能正常作业[18],及发生漏电等安全事故。因此,开展山地物探电动钻机的安全性分析尤为重要。
2.1 电动钻机结构的安全性分析
2.1.1 电动钻机仿真模型的建立
1)模型简化。
根据电动钻机的结构,利用Creo软件进行建模和装配。为便于分析和计算,去除无影响的螺栓和螺母。利用ANSYS软件中的Space Claim填实圆孔,对复杂零部件中无影响或影响较小的特征如倒角、圆角等进行简化。
2)材料定义。
电动钻机机械结构的材料为45钢。其密度为7 890 kg·m-3,弹性模量为2.09×105 MPa,泊松比为0.269,抗拉强度σb=600 MPa,屈服强度σs=355 MPa。
3)网格划分。
采用自由网格划分。对桅杆、拉杆、π形底盘的网格进行细化,其网格大小为8 mm,其他部分的网格大小为30 mm。钻机整体网格划分的平均质量评价值为0.87,共划分为599 423个节点、298 329个单元。
4)边界条件设置。
将与地面接触的4个π形底盘支腿的脚座设置成固定约束;在旋转装置处的钻杆平面设置接触力,最大提升力F=7 kN;在旋转装置处的钻杆表面设置扭矩,最大扭矩T=600 N·m。
构建的山地物探电动钻机仿真模型如图3所示。
图 3
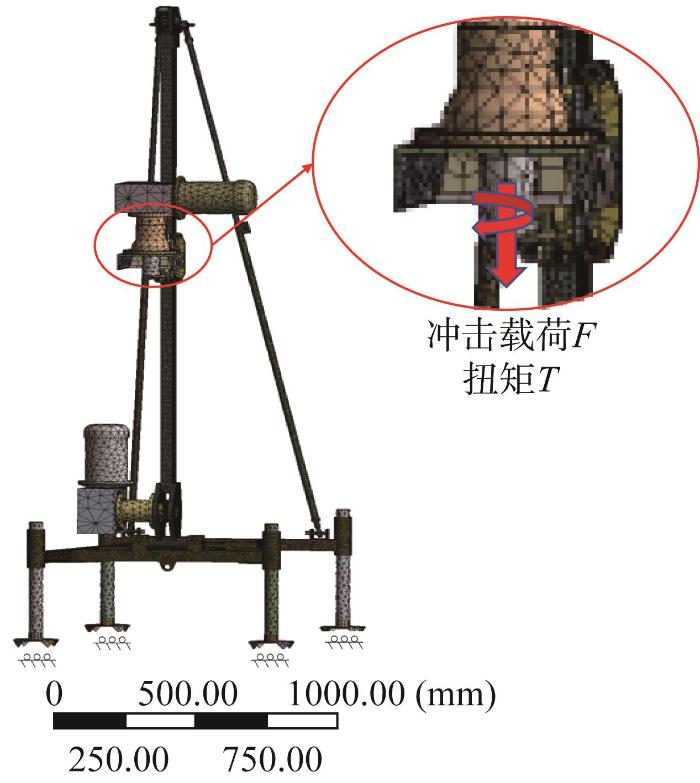
图 3
山地物探电动钻机仿真模型
Fig.3
Simulation model of mountain geophysical electric drilling rig
2.1.2 电动钻机钻井仿真结果的分析
利用ANSYS软件进行有限元仿真,仿真后山地物探电动钻机的变形如图 4所示。由图可知,钻机在钻井作业过程中的变形呈从上至下逐渐递减,最大变形出现在桅杆上部和旋转装置的电机处,其次是桅杆中上部和旋转装置除电机外的部分,再次就是桅杆下部和提升装置,变形最小的是4条支腿,其几乎没有变形。
图 4
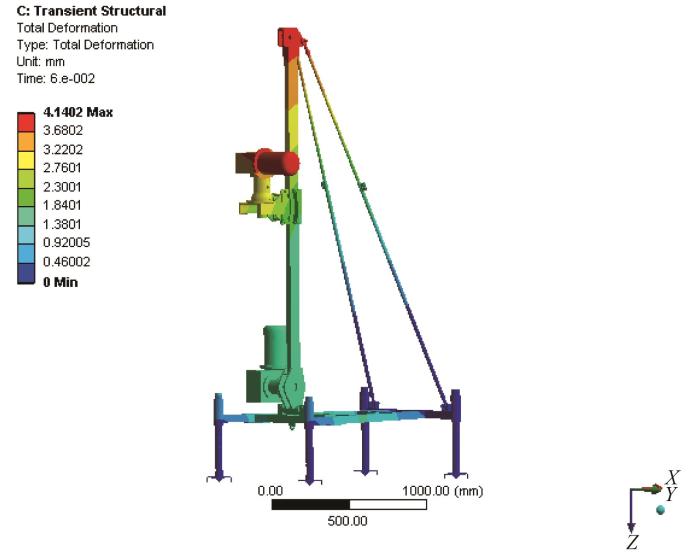
图 4
山地物探电动钻机变形云图
Fig.4
Deformation nephogram of mountain geophysical electric drilling rig
山地物探电动钻机应力云图如图5所示。由图可知,应力主要集中在π形底盘底架、底盘支腿、桅杆以及旋转装置与桅杆的连接处。其原因是:电动钻机整体的重量主要由π形底盘承担;在载荷的作用下,旋转装置与桅杆连接处会有应力产生;旋转装置沿桅杆上下移动,导致桅杆四侧也有相应的应力产生。
图 5
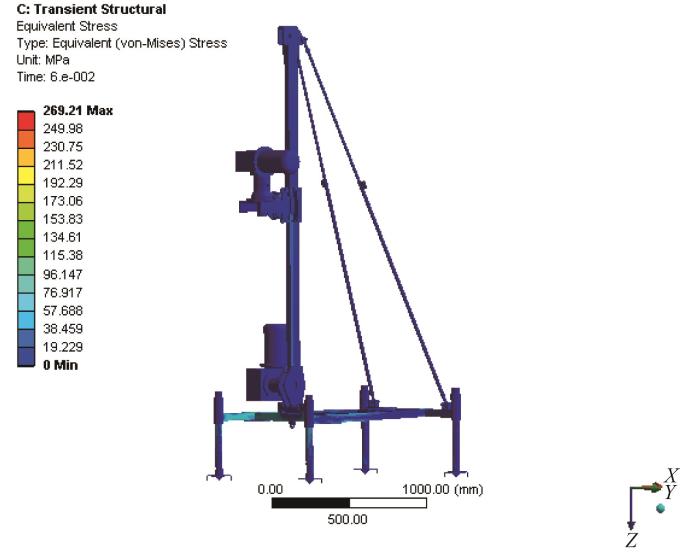
图 5
山地物探电动钻机应力云图
Fig.5
Stress nephogram of mountain geophysical electric drilling rig
图 6
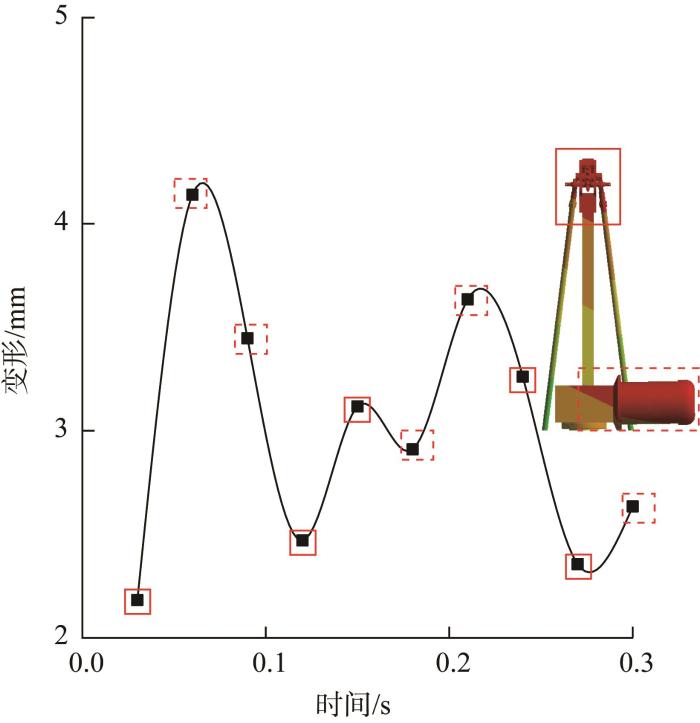
图 6
山地物探电动钻机最大变形随时间的变化曲线
Fig.6
Variation curve of maximum deformation of mountain geophysical electric drilling rig with time
图 7
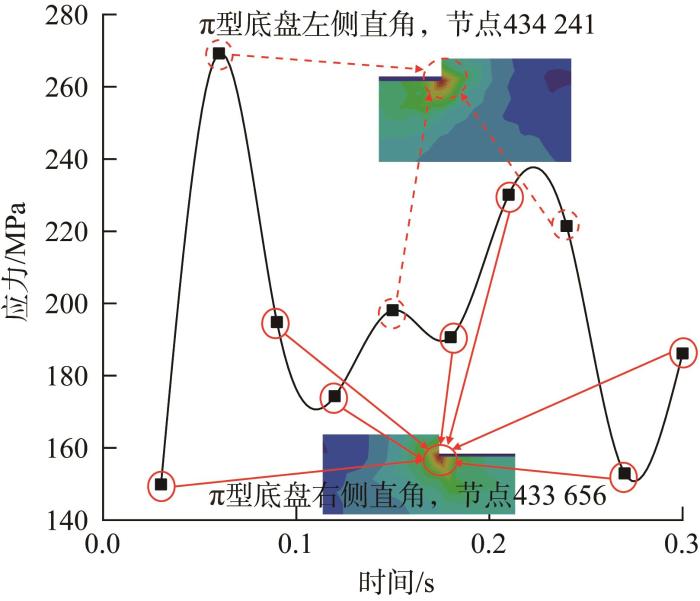
图 7
山地物探电动钻机最大应力随时间的变化曲线
Fig.7
Variation curve of maximum stress of mountain geophysical electric drilling rig with time
2.2 电机电路的安全性分析
电动钻机的电机为大电压小电流,且设有多功能无触电保护器,具有屏蔽泄漏电流、电子波、噪声、静电、落雷以及抑制电器起火的功能。
当电路出现短路、过流、过压、欠压、输入和输出缺相时,电路驱动器会自我保护而自动停止工作;当电流过载时,电机自动停止工作;当电机过热时,控制系统会发生报警。电机电路中设有制动回路,具有制动管过载保护和制动电阻保护功能。如果瞬间断电,即当电源电压出现瞬间消失或瞬间掉落的情况时,电机电路可以保持母线电压,不会出现欠压故障,电机的输出也不会停止。
3 山地物探电动钻机的钻井试验
为了测试山地物探电动钻机的性能,进行了钻井实验。实验现场如图8所示。钻机分为π形底盘、提升装置、旋转装置、桅杆-导向装置-拉杆四个模块,每个模块的质量小于50 kg,整机质量小于150 kg,模块之间大多采用销轴连接,组装十分快捷。
图 8

图 8
山地物探电动钻机钻井实验现场
Fig.8
Drilling test site of mountain geophysical electric drilling rig
通过电动钻机钻井实验,得出:在钻井过程中,提升装置的提升与下降速度为0.3 m/s,最大提升力能够达到24 kN;在正常钻进的情况下,钻杆下降的速度较小,所需的提升力较小;旋转装置的旋转速度能够达到200 r/min,在卡钻时其扭矩能够达到640 N·m,可以提供足够的旋转扭矩来解决卡钻的问题。钻机在钻井过程的提升力和扭矩远远超过野外勘探钻井所要求的提升力(7 kN)和扭矩(600 N·m)。
此外,将鸡和鱼作为实验活物,开展钻机电机电路的漏电保护实验。实验结果表明,在电机电路的安全性保护下,漏电电流对鸡和鱼的生命没有造成影响,故电机电路漏电不会威胁工作人员的生命安全,电机电路是安全可靠的。
在整个实验过程中,钻机没有因为受到钻井过程中的冲击载荷和扭矩而出现振动大、强度不足以致失效等情况。通过实验可知:1)自主设计的山地物探电动钻机实现了轻量化、模块化和搬运的便利性;2)钻机结构以及电机电路的设计合理,安全可靠;3)钻机在钻井过程中噪声低,没有尾气排放,改善了操作工人的工作环境;4)钻机可提供的最大提升力和扭矩远远超过设计标准,达到了野外勘探钻井的要求。
4 结 论
1)以电能驱动代替燃油机驱动,设计了山地物探电动钻机模块化方案。基于模糊综合评价法优选驱动电机和传动方式,确定了驱动电机为永磁同步电机,传动方式为链轮链条传动,同时通过对比优选出减速器、支撑部件和导向部件分别为涡轮蜗杆减速器、π形底盘和单桅杆。
2)采用有限元分析方法进行了钻机的安全性分析,得出钻机最大变形位于桅杆上部和旋转装置的电机处,最大应力出现在π形底盘连接桅杆的直角处。最大应力小于钻机材料的许用应力,设计的钻机结构是安全的。
3)开展了钻机钻井实验和漏电保护实验。结果表明:自主设计的山地物探电动钻机较现有山地物探钻机质量减小了57%,达到了轻量化、模块化的设计要求;钻机在钻井时噪声低,没有尾气排放,符合绿色环保的要求;钻井时可以提供的最大提升力和扭矩分别超过设计标准的71%和6.25%,完全达到了野外勘探钻井的标准要求。因此,该电动钻机设计合理,安全可靠,具有广阔的应用前景。
参考文献
山地钻机液压马达轴承拆装工具
[J].
Mountainous drilling machine hydraulic motor bearing disassembly tool
[J].DOI:10.3969/j.issn.1006-2114.2018.02.029 [本文引用: 1]
WT50物探钻机设计与分析
[D].
Design and analysis of geophysical rig
[D].
新型轻便旋转式物探钻机总体设计及动力学分析
[D].
Overall design and dynamic analysis of a new type of portable rotary geophysical drilling rig
[D].
浅谈钻机的噪声控制
[J].
Brief analysis on noise control of rigs
[J].DOI:10.3969/j.issn.1001-3482.2003.04.021 [本文引用: 1]
新型轻便气动钻机的开发与应用
[J].
Development and application of new portable pneumatic drill
[J].DOI:10.3969/j.issn.1671-0657.2018.02.010 [本文引用: 2]
新型山地钻机的开发与应用
[J].
New portable drill rig development and application
[J].DOI:10.3969/j.issn.1671-0657.2012.03.002 [本文引用: 1]
80 m山地钻机的开发与应用
[J].
Development and application of mountain rig with 80 m drilling depth
[J].
活塞式空压机在山地物探爆破孔施工中的应用研究
[D].
Application research on piston air compressor in country mountain physical prospecting blast hole construction
[D].
滚珠丝杠传动机构的支承与轴端结构分析
[J].
Support and shaft structure analysis of ball screw transmission mechanism
[J].DOI:10.3969/j.issn.1673-5587.2019.05.003 [本文引用: 1]
一种基于耦合追踪策略的太阳追踪系统设计
[J].
A solar tracking system design based on coupled tracking strategy
[J].
三轮非圆同步带传动试验台设计与应用
[J].
Design and test of three-pulley noncircular synchronous belt transmission test rig
[J].DOI:10.6041/j.issn.1000-1298.2021.01.008 [本文引用: 1]
Research on the dynamic characteristics of mast mechanism of rotary drilling rig
[J].
旋挖钻机桅杆结构优化分析
[J].
Structure optimization analysis for mast of rotary drilling rig
[J].DOI:10.4028/www.scientific.net/amm.48-49.783 [本文引用: 1]
旋挖钻机桅杆的结构设计
[J].
Structure design of the mast of rotary drilling rig
[J].
天然气管输减阻剂减阻效果现场评价方法研究
[J].
Method for field evaluation of drag reduction effect of natural gas drag reduction agent
[J].
基于模糊综合评价的交易结算偏差电量处理方法
[J].
A method to deal with the deviation electric quantity of transaction settlement based on fuzzy comprehensive evaluation
[J].
基于改进模糊综合评判法的空压机状态评估
[J].
State evaluation of air compressor based on improved fuzzy comprehensive evaluation method
[J].

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}