轮-履-腿复合仿生机器人步态规划及越障性能分析
Gait planning and obstacle-surmounting performance analysis of wheel-track-leg composite bionic robot
轮-履-腿复合仿生机器人步态规划及越障性能分析 |
| 芮宏斌,李路路,曹伟,王天赐,段凯文,吴莹辉 |
|
Gait planning and obstacle-surmounting performance analysis of wheel-track-leg composite bionic robot |
| Hong-bin RUI,Lu-lu LI,Wei CAO,Tian-ci WANG,Kai-wen DUAN,Ying-hui WU |
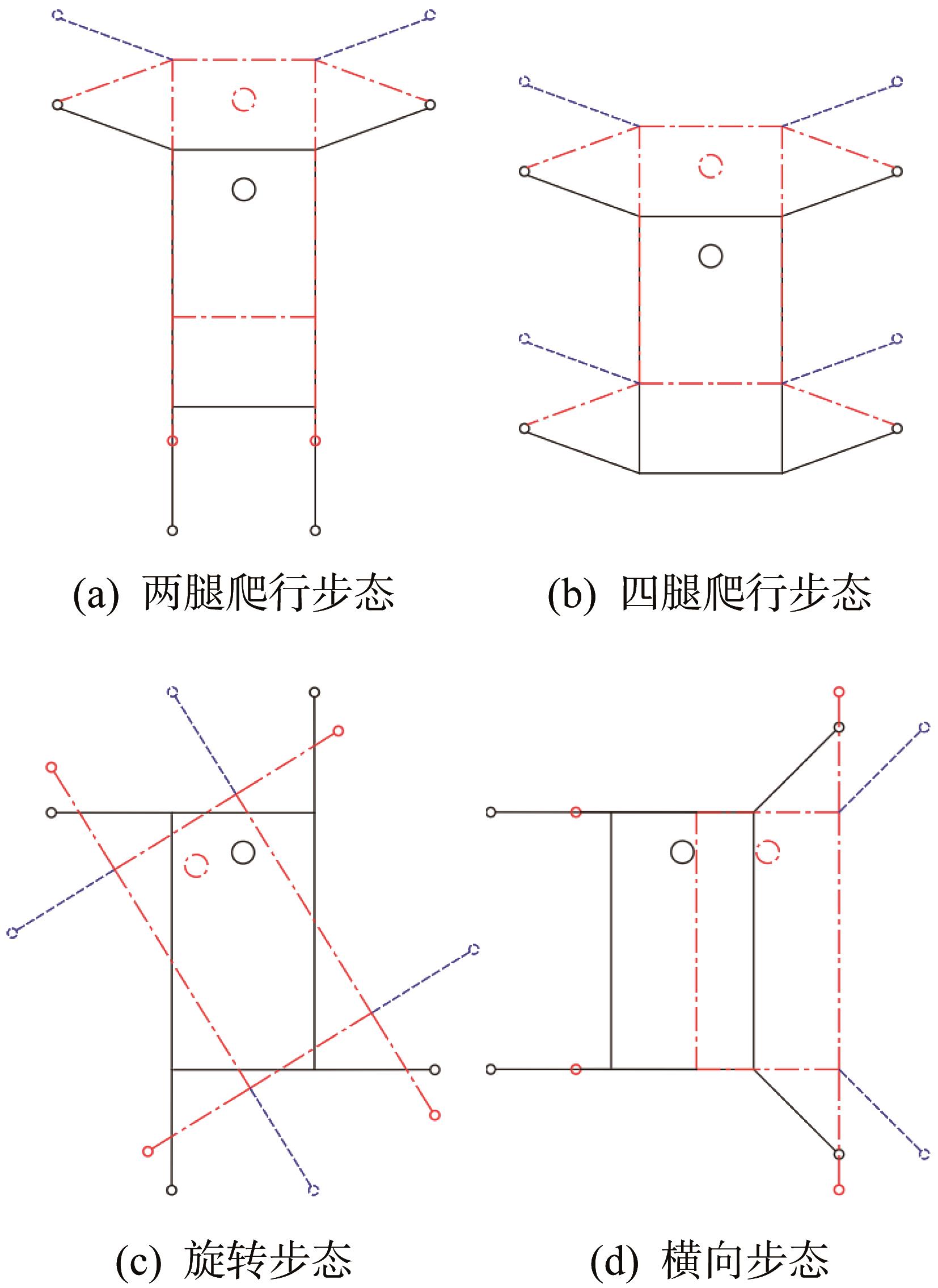
| 图6 轮-履-腿复合仿生机器人的4种仿海龟爬行步态 |
| Fig.6 Four imitation turtle crawling gaits of wheel-track-leg composite bionic robot |
|
|