4WID-4WIS智能车阿克曼转向轨迹规划及位置估算
Ackerman steering trajectory planning and position estimation of 4WID-4WIS intelligent vehicle
4WID-4WIS智能车阿克曼转向轨迹规划及位置估算 |
| 时培成,陈旭,杨爱喜,章亮 |
|
Ackerman steering trajectory planning and position estimation of 4WID-4WIS intelligent vehicle |
| Pei-cheng SHI,Xu CHEN,Ai-xi YANG,Liang ZHANG |
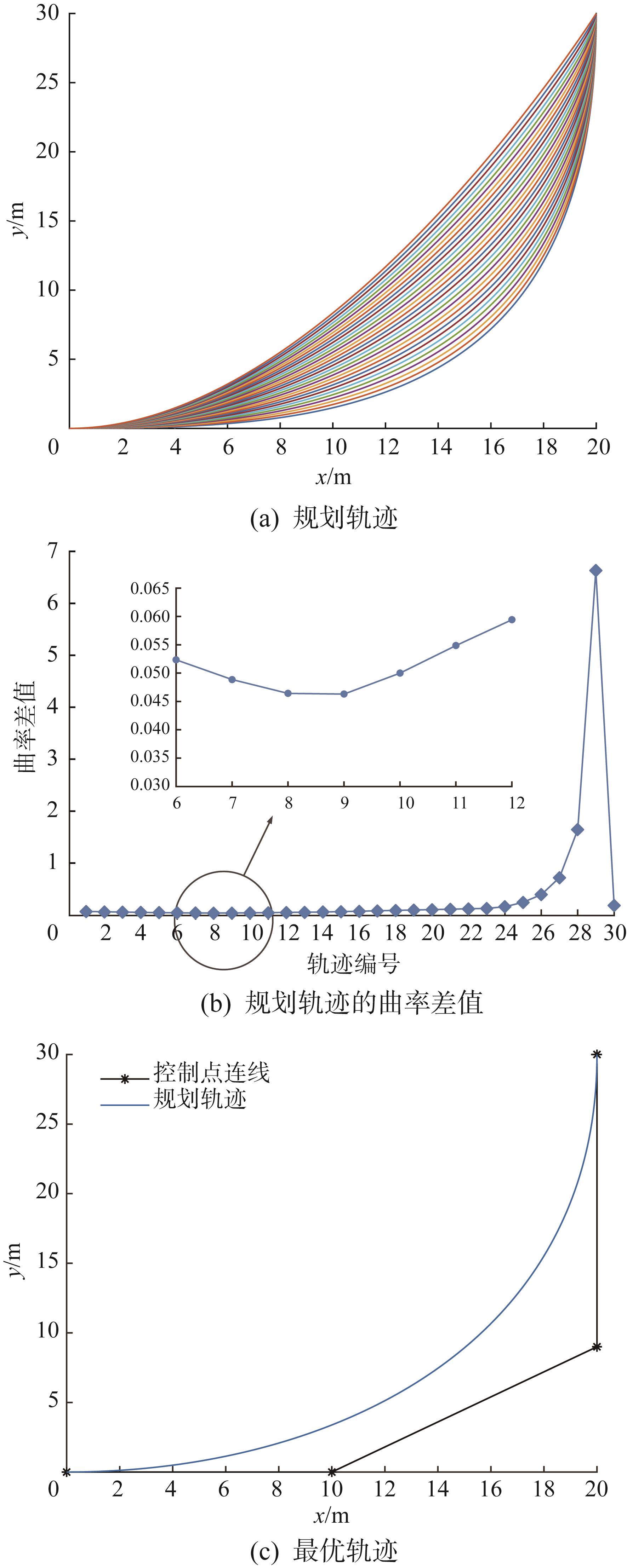
| 图3 改变控制点 |
| Fig.3 Trajectory planning simulation results of 4WID-4WIS intelligent vehicle obtained by changing control point |
|
|