



兰州市地处陇中黄河沿岸的兰州盆地,南北群山夹峙,黄河自西向东横穿市境. 自20世纪80年代以来,兰州城市化进程加快,重石化、冶金及配套的装备制造业产业链发展迅速,工业用地和城市用地比率持续增加,致使市辖建成区面积急剧扩张(1985、2005、2013年分别为105、139、197 km2). 城市建成区拓展导致为以不透水面(impervious surface)为主的人为景观取代原本以植被和土壤为主的自然景观,成为下垫面的主要景观类型,并作为显著影响区域地表热量循环[1]、降雨径流[2]和污染物迁移分布[3-4]过程的直接驱动力.
EO-1 ALI图像在可见光−中红外谱段内有9个多光谱波段,融合图像的空间分辨率为10 m,并可以免费获取,是当前在区域尺度下获取不透水面覆盖信息的理想数据源[5-7]. 目前,不透水面遥感提取方法主要有:目视解译[8]、基于像元的最大似然监督分类(MLC)[9-10]、基于VIS模型(植被−不透水面−土壤)的混合像元线性光谱分解法(LSMM)[11-12]. 本文前期分别采用MLC和VIS-LSMA方法进行测试,从兰州城关区EO-1 ALI图像提取不透水面. 测试结果表明,这两种方法的提取精度偏低(总体精度、Kappa系数分别为75.13%、0.682 2,77.49%、0.706 7),很难被进一步用于专题分析和图谱制作.
分析上述两种方法的测试结果发现,基于像元的MLC和VIS-LSMA方法都只依据各种类别的光谱特征,基于单一计算模型对全域遥感图像进行一次分类. 兰州城关区不透水面的组分多样、匀质性低且空间异质性强,致使光谱特征复杂、发散;低反照度不透水面(沥青路面)与水体、地物阴影以及非光合作用植被的光谱特征相似,高反照度不透水面(干燥水泥地表)与干土壤、砂土地光谱特征相似[11-13]. 采用VIS-LSMA从遥感图像上选取纯净不透水面光谱端元,与实测参考端元匹配的难度大;依据波谱特性的差异,采用线性模型对全域混合像元分解的方法适用性不强[14-15]. 对于MLC,分类结果的确立实质上是由预置的训练样本决定,由于仅依据光谱特征很难从图像上为全部类别选取典型、完备训练样本集[16-18],因此在MLC分类图中错分、漏判光谱特征相近类别的情况多,且分类图中不透水面图斑内部包含其他类别碎斑或像元.
实地调查表明,兰州城关区下垫面景观类型除不透水面外,主要是水体和4种植被类别(城市绿地、灌木林地、农用地、草地)以及砂土、阴影等其他少量杂类,这些背景类别的面积总和小于城关区全域面积的50%;在EO-1 ALI图像上,水体和各类植被具有显著的遥感多特征(光谱、形状和尺度特征)[18-20]. 本文提出基于面向对象多尺度分割的最邻近分类法(NNC)和LOOC方法,对比分析利用这2种方法识别不透水面的精度差异. NNC方法是在4尺度分割的基础上,利用监督分类正向直接识别不透水面;LOOC方法先依据主要背景类别(水体和植被类)对象的多特征知识构造识别规则,利用决策树分类将其分离出解译底图,然后基于光谱反射率分析和FCM非监督分类,再分离出与高、低照度不透水面光谱特征相近的类别(砂土和阴影),从而间接提取出不透水面. LOOC方法为城市遥感图像解译提供一个新的思路,对利用高分多光谱遥感数据开展城市规划、生态环境监测的意义重大.
1 研究区概况、数据源与技术路线分析 1.1 研究区概况兰州市地理位置位于35°35′—37°7′N,102°36′—104°34′E,地处陇西黄土高原、内蒙古高原和青藏高原的交接汇合地带. 黄河自西南向东北流经兰州城区38 km,切穿山岭,形成峡谷与盆地相间的串珠带状河谷. 城区中心海拔为1 520 m,河谷相对高差为500~600 m,河谷盆地内以黄土地貌系列和河流阶地为主. 兰州市属温带半干旱大陆性季风气候,年平均气温为10.3 °C,年均降水量为327 mm,且多集中于夏季6~9月,年均蒸发量为1 486 mm,年均日照时数为2 446 h,无霜期约为180天. 河谷盆地的昼夜温差大、内风速小、逆温强.
兰州市是西北地区重要的石化、冶金工业城市和综合交通枢纽. 自上世纪80年代初以来,兰州市城市化进程加快,到2013年底,兰州市辖区建成区面积约为197 km2,建成区常住人口约为260万人,城市化水平达到65%. 作为一个东西长、南北窄的带状河谷型盆地城市,伴随城市规模的扩张,兰州市城区下垫面性质和景观格局发生巨大变化,城区热岛效应、水质面源污染、流域水文循环异常等区域生态环境问题表现突出.
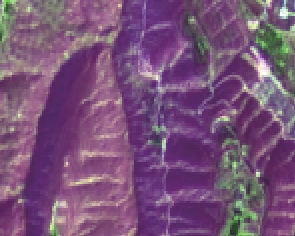
1.2 基础数据来源基础数据包括兰州市城关区EO-1 ALI图像、专题图件和调查统计资料. EO-1 ALI图像条带号(STARTING-ROW)/行编号(WRS-PATH)为130/35,成像日期为2012-07-27,太阳高度角为62.122 2°. 对EO-1 ALI图像的预处理包括FLASSH大气校正、几何精校正、边界剪裁和像素级融合(融合图像空间分辨率为10 m,见图1). 专题图件主要有兰州市ASTER GDEM(V2版)、甘肃省1∶10万土地利用数据集(2000年)、中国陆地生态系统类型空间分布数据(1∶10万,1995/2008年). 统计调查资料有《兰州统计年鉴》、《兰州市城关区志》以及通过外业调查建立的9种类别EO-1 ALI图像解译标志(见表1)等.
| 表 1 兰州市城区EO-1 ALI图像9种类别解译标志 Table 1 Interpretation keys of9kinds of terrestrial objectsin EO-1 ALI image ofChengguan County |







|
图 1 融合后的EO-1 ALI图像 Fig. 1 Fused EO-1 ALI image |
LOOC方法的技术路线如图2所示. 将EO-1 ALI多波段图像与全色图像进行融合,提升多波段图像空间分辨率至10 m;对融合图像进行LBV变换,增强图像中背景类别的光谱特征,将LBV变换图像作为解译底图;设置4个尺度层次,依次用于识别“水体—>农用地—>灌木林地—>城市绿地和草地”,对解译底图执行4尺度面向对象分割;依据对象的尺度特征、光谱特征和形态特征构造判别规则,利用知识决策树分类依次从解译底图识别、分离上述5种背景类别,得到全域不透水面初级提取图层. 分析高、低照度不透水面和砂土,阴影的光谱反射率差异,选定EO-1 ALI图像的近红外波段8和中红外波段10作为有效特征,利用基于模糊C-均值(FCM)算法分类,从初级图层中再分离出与砂土、阴影(光谱特征分别与高、低反照度不透水面相近);利用数学形态学开闭运算整饬图像,得到最终的不透水面二级提取图层.

|
图 2 LOOC方法技术路线 Fig. 2 Technical route of LOOC classification method |
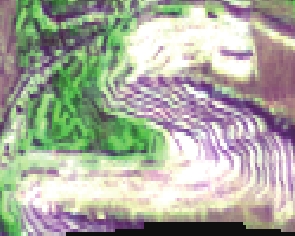
利用LBV变换,对EO-1 ALI图像的绿波段 (波段4,波长为525~605 nm)、红波段 (波段5,波长为633~690 nm)、近红外波段B (波段6,波长为775~805 nm)和短波红外波段 (波段9,波长为1 550~1 750 nm)进行线性变换,生成3个物理意义明确、互不相关的特征波段L、B和V. 波段L为亮度分量(见图3(a)),表征地表总辐射水平;波段B为湿度分量(见图3(b)),表征地物可见光辐射和红外光辐射强弱的对比关系,监测水分和地表层潮湿程度;波段V为绿度分量(见图3(c)),表征地物辐射随波段改变而变化的方向及速率,监测植被密度和生长状况.

|
图 3 LBV变换图像 Fig. 3 LBV transformation image |
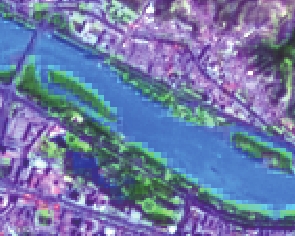
判读由L、B和V合成假彩色图像(见图4),在图4中高、低照度不透水面分别呈灰白色和黄色,黄河水体、农用地、灌木林地、城市绿地和草地依次呈品红色、绿色、蓝色、紫色和青色. 将图4、1进行叠加比对. 结果表明,LBV变换后,图4中各种类别内部像元聚合成斑块,斑块内部同类别像元的色差减小,同质度提高;削弱斑块内部的纹理特征以及异类像元和碎斑的光谱特征,“椒盐效应”被明显弱化;同时,相邻不同类别斑块之间的光谱特征差异对比明显,边界特征突出,容易区分不同类植被、辨识河流岸界.

|
图 4 LBV变换合成图像 Fig. 4 LBV transformation image |
分别由特征波段L、V以及EO-1 ALI图像的波段6、波段9构建特征空间,对比分析上述各类别在这两个特征空间的散度图特征(依据外业调查建立的解译标志,在图4中勾绘出河流水体、2种不透水面、4种植被的典型样区,然后将各样区像元投入到L-V空间和波段6~9空间中,聚合成散度图5(a)、(b)). 图中,HBandL、HBandV、HBand9、HBand6分别为波段L、波段V、波段9和波段6的灰度.图5(a)、(b)表明,在2个特征空间中,散度图均能够形成“三角形”;农用地、河流水体、高反照度不透水面的像元点簇分别位于“三角形”的3个顶端,其余类别点簇位于“三角形”的中间区域.

|
图 5 空间散度图对比 Fig. 5 Scatter diagrams of different two-dimensional feature space |
相较于波段6~9空间,在图5(a)所示的L-V空间中,水体、4种植被、2种不透水面点簇在L、V指向上均按层排列、紧密聚集,形态规整;相邻不同类别点簇之间的重叠度低、界线明确,容易在纵轴和横轴指向上区分出各类别所属的数值区间. 选定LBV变换图像作为解译底图.
2.2 多尺度面向对象分割面向对象分割依据目标地物的光谱特征、形状特征的异质性程度确定尺度(scale)分割图像. 图像被分割后,基本单元由像元转换为邻接的多边形同质图斑(即地理对象). 分割过程的关键步骤是针对目标类别,选定解译底图和分割参数(尺度S、光谱因子SF、形状因子FF、紧致度CF和光滑度SNF)[19-20]. 针对5种主要背景类别:“水体、农用地、灌木林地、城市绿地和草地”,对应设置4个尺度层次,具体的分割参数如表2所示.
当S=41、29、21、12时,对LBV变换的图像分割结果如图6(a)~(d)所示. 与未分割的图像(见图4)相比,在图6(a)~(d)中,河流水体、2种不透水面和4种植被类别内部的斑块进一步聚合,形成色调完全一致、形状规则的对象. 对象内部融入孤立分布其间的异类噪声碎斑和像元,并完全去除纹理特征差异;同类别对象进一步组合成面积更大的图斑,大图斑边界特征突出,内部光谱特征变异程度较未分割前显著减小,并且相邻、不同类别图斑间的色调差异、形状特征差异明显.

|
图 6 不同尺度下图像分割结果对比 Fig. 6 Comparison of segmented images with different scales |
图6(a)中,黄河水体图斑整体呈均一红色的条带状,与邻接的面状低反照度不透水面图斑、绿地图斑对比明显,图斑边界位置清晰明确,未出现由于过分割导致水体图斑合并相邻不透水面、城市绿地对象的情况;图6(b)、(c)中,农用地、灌木林地图斑均呈面状连续分布,图斑内部光谱特征匀质,没有草地、不透水面的噪点,与相邻其他类别之间的界限清晰明确;图6(d)中,由城市绿地和草地对象聚合成的图斑形状多呈规整的块状或窄带状离散分布,图斑与相邻的高(低)照度不透水面对象光谱特征差异明显,边界明确,没有出现因欠分割导致对象被相邻的不透水面图斑融入的情况.
2.3 多特征决策树分类基于知识决策树分类的地物识别过程依据遥感多特征知识形成逻辑判断(规则),一条规则对应二叉决策树的一个节点,由决策树根节点至叶结点的一条路径构成一组规则;每条规则将待识别对象判别为两类,一组规则能够将待识别类别对象归属到指定类别. 通过人机交互测试,设置识别黄河水体的判别规则为:−15 000<Lth (长度)<−5 150,−3 930<V<2 500,Lth/Wth(长度/宽度)>4.6,Shape(形状指数,区域边界长与4倍区域面积取平方根的比值)>1.9;识别农用地的判别规则为:−7 100<Lth<2 510,1 690<V<9 870,Lth/Wth<3.3,Shape<1.6;识别灌木林地的判别规则为:−5 210<Lth<−1 260,−2 100<V<970,Lth/Wth<2.8;识别城市绿地和草地的判别规则为:−5 160<Lth<9 370,−230<V<6 120,Lth/Wth<2.8.
具体的分类过程分为以下4步. 1)确定首个目标背景类别及分割参数,对LBV变换图像执行面向分割. 2)将目标背景类别对象的光谱特征(波段L、B、V)、形状特征(长度/宽度、形状指数),作为判别规则,采用决策树分类识别出该背景类别,再利用掩膜运算将背景类别从解译底图上去除. 3)选择下一个背景类别,按表2及决策树判别规则再次分割、识别、分离下一种背景类别. 如此迭代4次,将水体、农用地、灌木林地、城市绿地和草地这5种主要背景类别依次从解译底图上去除,至此解译底图剩余内容为全域不透水面的初级提取图层(见图7(a)). 4)将已分离出的全域水体和4种植被类别叠加为一个图层,套合图1,生成城关区透水面类别的提取结果(见图7(b)),将图7(a)、(b)分别与图1叠加检查分析.

|
图 7 LOOC方法的初级提取结果 Fig. 7 Primary extraction results using LOOC |
检查结果显示,图7(a)上已完全去除水体、4种植被这5种主要背景类别;除不透水面外,图7(a)还保留有砂土、阴影图斑,它们的光谱特征分别与高、低照度不透水面相近. 图7(b) (透水面提取结果)没有出现错提不透水面对象的情况;特别是在黄河沿岸,南山、北山脚下以及城区内部,能够准确地识别出小面积的各类植被对象,而与这些植被对象相邻的低照度不透水面对象均得到完整滤除.
2.4 FCM非监督分类在遥感图像上,砂土、阴影分别与高、低反照度不透水面的光谱特征相近. 图8(a)~(b)对比显示,城关区EO-1 ALI图像上这4种类别的光谱反射率差异. 图中,R为光谱反射率. 图8(a)表明,在EO-1 ALI图像上从近红外波段8(波长为1 200~1 300 nm)到中红外波段10(波长为2 080~2 350 nm),低反照度不透水面的光谱反射率变化波动幅度小,基本保持平稳,阴影的光谱反射率呈下降趋势,两者差异显著.

|
图 8 高、低反照度不透水面的光谱特征差异对比 Fig. 8 Comparison of spectral feature of high- and low-albedo impervious surface |
图8(b)表明,在EO-1 ALI图像上近红外谱段(波段6~9) 内,高反照度不透水面和砂土的光谱反射率整体上均成上升趋势,到中红外谱段(波段10),两者的光谱反射率成下降趋势. 相比较而言,波段8和波段10对砂土与高反照度不透水面的区分效果,优于近红外—中红外谱段内的其他波段. 参照文献[13]、[19]的研究结果,选取EO-1 ALI图像的波段8、波段10作为有效特征,对初级提取结果进行基于模糊C-均值算法(FCM)的非监督分类.
FCM算法根据最小二乘法原理,基于隶属度矩阵和聚类中心向量,采用迭代法优化目标函数,能够得到每个样本点(即像元)对类别中心的隶属度,据此确定每个样本点的类别归属. 执行基于FCM算法的非监督分类分为以下6步:1)对波段8和波段10的光谱值进行归一化处理;2)设置聚类中心数为5(除上述4种类别外,再设置一个“其他类”),设置加权指数为1.2,设置迭代收敛条件(隶属度最小变化量为10−5,最大迭代次数为200);3)利用FOR循环迭代更新聚类中心向量以及各个像元对各聚类中心的隶属度(隶属度矩阵);4)循环结束,比较各个像元对各个类别的隶属度,据此确定类别归属;5)输出分类图,依据外业调查建立的解译标志,综合图斑上、下文特征,通过目视判读勾绘出砂土、阴影类别,并将其从解译底图上去除;6)辅助人工选点并利用多个尺寸的结构元素模板,组合开、闭运算作为一对形态滤波器,整饰分类图,得到全域不透水面的最终分类结果(见图9(a)).

|
图 9 2种方法不透水面提取结果结果比较 Fig. 9 Comparison of extraction results of impervious surface with two methods |
如图9(b)所示为采用基于面向对象多尺度分割的最邻近分类法(nearest neighbor classification,NNC)得到的分类结果. 为了与LOOC方法进行比较,NNC方法参照表2,由大到小依次设置4个尺度层次(见表3).
| 表 2 多尺度分割参数 Table 2 Parameters used in multi-resolution |
| 表 3 NNC方法的多尺度分割参数 Table 3 Parameters used in multi-resolution segmentation of NNC |
NNC方法的具体分类过程分为以下5步. 1)在尺度41下对解译底图(LBV变换图像)执行面向对象分割,设置“河流水体、植被、高照度不透水面、低照度不透水面、其他类”这5个类别,选取训练样本执行NNC分类;2)利用掩膜运算,将已得到的“河流水体”类别从解译底图上去除后,选取尺度29分割,设置“农用地、灌木林地、城市绿地和草地、高照度不透水面、低照度不透水面、其他类”这6个类别,选取训练样本执行NNC分类;3)从解译底图上去除“农用地”类别后,选取尺度21分割,设置灌木林地、城市绿地和草地、高照度不透水面、低照度不透水面、其他类这5个类别,执行NNC监督分类;4)从解译底图上去除“灌木林地”类别后,选取尺度12分割,设置“城市绿地和草地、高照度不透水面、低照度不透水面、阴影、砂土地”这5个类别,执行NNC分类;5)将从1、2、3尺度层次得到的河流水体、农用地、灌木林地这3个类别与4尺度层次得到的分类结果拼接,如图9(b)所示.
2.5.2 分类结果对比采用目视判读和定量分析,对图9(a)、(b)进行对比分析评价. 当目视判读时,分别将图9(a)、(b)与未分割的原图(见图1)进行叠加分析,检查2幅图中不透水面区域的边界是否与图1吻合一致. 1)图9(a)、(b)识别不透水面的效果基本相当,不透水面区域界限与目标位置有较好的吻合度,特别是在沿黄河岸界地带和城郊地区,较少出现低照度不透水面图斑与水体图斑、绿地图斑混分的情况;将山体阴坡草地、水体图斑被错分为低照度不透水面的情况. 2)相较于图9(b),在图9(a)更少出现高照度不透水面图斑(干燥水泥地表)与砂土地混分、低照度不透水面图斑(沥青路面的街道)与阴影混分的情况. 3)图9(a)、(b)中,“椒盐效应”均被有效抑制. 图1中,不透水面图斑内部孤立分布噪声像元及各类别碎斑(绿地、草地、阴影、砂土);图9(a)、(b)中,这些碎斑被完全融入到相邻的不透水面图斑中. 此外,图9(b)中,在透水面区域零散分布的不透水面和砂土碎斑显著减少.
定量分析时,分别从图9(a)、(b)随机抽取200个像元,通过目视判读依次确定实际类别归属,与图像分类结果进行比对,计算图9(a)、(b)的总体精度和Kappa系数,如表4所示. 表中,Aoc为总体精度. 统计结果表明,采用NNC方法,从EO-ALI图像上提取不透水面的总体精度、Kappa系数分别为82.27%、0.7746;采用LOOC方法的总体精度、Kappa系数分别为87.13%、0.8303,较NNC方法分别提高5.91%、7.19%. 综合评价表明,与NNC方法相比,采用LOOC方法从EO-1 ALI图像提取不透水面,能够更快速地分离出主要背景类别(水体和植被类),有效地减少光谱特征相近类别(砂土、阴影)与高、低反照度不透水面混分的现象.
| 表 4 图像分类精度评价 Table 4 Accuracy evaluation of extension results of impervious surface |
利用LOOC方法和基于多尺度面向对象分割的NNC方法,均取得较好的不透水面识别效果. LOOC方法是在去除主要背景类别干扰的基础上,结合光谱反射率分析、非监督分类和目视解译,针对性地鉴别、分离砂土地和阴影类别;图9(a)中,砂土地、阴影类别与高、低反照度不透水面的混分情况更少. NNC方法对河流水体、农用地、灌木林地、城市绿地和草地类别取得较好的识别效果,但NNC方法要依次在4个尺度层次下,分别为各类别选取训练样本,以执行监督分类,因此NNC方法耗费的时间多于LOOC方法.
3 结 语不透水面光谱特征复杂、发散,从EO-1 ALI图像上,正向直接识别不透水面的难度大,耗时多. 本文提出的LOOC方法强调将不透水面的提取过程分级开展,每级选用不同的分类标准和方法,将背景类别分离出解译底图,从而间接、逐步地逼近不透水面精准空间的分布信息. 在下一步工作中,将基于其他星载平台(如CBERS-04星、ZY3星、GF-1/2星、HJ-1-A/B星)高分多光谱遥感数据,对LOOC方法进行进一步的测试改进,提高LOOC方法的适用性,使LOOC方法更好地服务于城市遥感图像解译任务.
| [1] |
宋瑞祥, 张庆国, 于海敬, 等. 遥感数据的城市不透水面估算及增温效应[J]. 浙江大学学报: 工学版, 2017, 51(5): 1501-1506. SONG Rui-xiang, ZHANG Qing-guo, YU Hai-jing, et al. Estimations to impervious surface and their effects of warming for ctiy using remote data[J]. Journal of Zhejiang University: Engineering Science, 2017, 51(5): 1501-1506. |
| [2] |
姚磊, 卫伟, 于洋, 等. 基于GIS和RS技术的北京市功能区产流风险分析[J]. 地理学报, 2015, 70(2): 308-318. YAO Lei, WEI Wei, YU Yang, et al. Research on potential runoff risk of urban functional zonesin Beijing city based on GIS and RS[J]. Acta Geographica Sinica, 2015, 70(2): 308-318. |
| [3] |
张甜, 王仰麟, 刘焱序, 等. 1987-2015年深圳市主城区景观演变过程多时相识别[J]. 地理学报, 2016, 76(12): 2170-2184. ZHANG Tian, WANG Yang-lin, LIU Yan-xu, et al. Multi-temporal detection of landscape evolutionin western Shenzhen City during 1987-2015[J]. Acta Geographica Sinica, 2016, 76(12): 2170-2184. |
| [4] |
李苗, 臧淑英, 吴长山, 等. 哈尔滨市城乡结合部不透水面时空变化及驱动力分析[J]. 地理学报, 2017, 72(1): 105-115. LI Miao, ZANG Shu-ying, WU Chang-shan, et al. Spatial and temporal variation and its driving forces of urbanimpervious surface in urban-rural continuum of Harbin[J]. Acta Geographica Sinica, 2017, 72(1): 105-115. |
| [5] |
张涛, 刘军, 杨可明, 等. 结合Gram-Schmidt变换的高光谱影像谐波分析融合算法[J]. 测绘学报, 2015, 44(9): 1042-1047. ZHANG Tao, LIU Jun, YANG Ke-ming, et al. Fusion algorithm for hyperspectral remote sensing image combined with harmonic analysis and Gram-Schmidt transform[J]. Acta Geodaetica et Cartographica Sinica, 2015, 44(9): 1042-1047. |
| [6] |
唐菲, 徐涵秋. 不同传感器线性光谱分解反演不透水面的对比-以Landsat ETM+和EO-1ALI为例[J]. 武汉大学学报: 信息科学版, 2013, 38(9): 1065-1072. TANG Fei, XU Han-qiu. A LSMA-based comparison of the performances in retriecving imperviosu surface between Landsat ETM+ and EO-1 ALI[J]. Geomatics and Information Science of Wuhan University, 2013, 38(9): 1065-1072. |
| [7] |
李博, 晏磊, 张立福. 传感器光谱指标对植被光谱模拟精度的影响[J]. 光谱学与光谱分析, 2010, 30(7): 1843-1847. LI Bo, YAN Lei, ZHANG Li-fu. Evaluation of sensor spectral parameters for the simulation accuracy of the vegetation spectrum[J]. Spectroscopy and Spectral Analysis, 2010, 30(7): 1843-1847. DOI:10.3964/j.issn.1000-0593(2010)07-1843-05 |
| [8] |
臧淑英, 冯仲科. 资源型城市土地利用/土地覆被变化与景观动态: 大庆市案例分析[M]. 北京: 科学出版社, 2008.
|
| [9] |
徐涵秋, 王美雅. 地表不透水面信息遥感的主要方法分析[J]. 遥感学报, 2016, 20(5): 1270-1289. XU Han-qiu, WANG Mei-ya. Remote sensing-based retrieval of ground impervious surfaces[J]. Journal of Remote Sensing, 2016, 20(5): 1270-1289. |
| [10] |
李玮娜, 杨建生, 李晓, 等. 基于TM图像的城市不透水面信息提取[J]. 国土资源遥感, 2013, 25(1): 66-70. LI Wei-na, YANG Jian-sheng, LI Xiao, et al. Extraction of imperious surface imformation from TM image[J]. Remote Sensing for Land and Resources, 2013, 25(1): 66-70. |
| [11] |
王浩, 吴炳方, 李晓松, 等. 流域尺度的不透水面遥感提取[J]. 遥感学报, 2011, 15(2): 388-400. WANG Hao, WU Bing-fang, LI Xiao-song, et al. Extraction of impervious surface in Hai Basin using remote sensing[J]. Journal of Remote Sensing, 2011, 15(2): 388-400. |
| [12] |
陈峰, 邱全意, 郭青海, 等. CBERS-02B多光谱数据在城市不透水面估算中的可用性研究[J]. 遥感学报, 2011, 15(3): 621-639. CHEN Feng, QIU Quan-yi, GUO Qing-hai, et al. The availability of CBERS-02B multi-spectral data in estimating urban impervious surface[J]. Journal of Remote Sensing, 2011, 15(3): 621-639. |
| [13] |
唐菲, 徐涵秋. 高光谱与多光谱遥感影像反演地表不透水面的对比-以Hyperion和TM/ETM+为例[J]. 光谱学与光谱分析, 2014, 34(4): 1075-1080. TANG Fei, XU Han-qiu. Comparison of performances in retrieving impervious surface between hyper-spectral (Hyperion) and multispectral (TM/ETM+) images[J]. Spectroscopy and Spectral Analysis, 2014, 34(4): 1075-1080. DOI:10.3964/j.issn.1000-0593(2014)04-1075-06 |
| [14] |
曹丽琴, 李平湘, 张良培, 等. Fuzzy ARTMAP算法在城市不透水面估算中的应用研究[J]. 武汉大学学报: 信息科学版, 2012, 37(10): 1236-1239. CAO Li-qin, LI Ping-xiang, ZHANG Liang-pei, et al. Estimating Impervious surfaces using the fuzzy ARTMAP[J]. Geomatics and Information Science of Wuhan University, 2012, 37(10): 1236-1239. |
| [15] |
张路, 高志宏, 廖明生, 等. 利用多源遥感数据进行城市不透水面覆盖度估算[J]. 武汉大学学报: 信息科学版, 2010, 35(10): 1212-1216. ZHANG Lu, GAO Zhi-hong, LIAO Ming-sheng, et al. Estimating urban impervious surface percentage with multi-source remote sensing data[J]. Geomatics and Information Science of Wuhan University, 2010, 35(10): 1212-1216. |
| [16] |
曾志远. 卫星遥感图像计算机分类与地学应用研究[M]. 北京: 科学出版社, 2004.
|
| [17] |
马利刚, 张乐平, 邓劲松, 等. 资源一号" 02C”遥感影像土地利用分类[J]. 浙江大学学报: 工学版, 2013, 47(8): 1508-1516. MA Li-gang, ZHANG Le-ping, DENG Jin-song, et al. Land use classification using ZY1-" 02C”remote sensing images[J]. Journal of Zhejiang University: Engineering Science, 2013, 47(8): 1508-1516. |
| [18] |
胡荣明, 黄小兵, 黄远程. 增强形态学建筑物指数应用于高分辨率遥感影像中建筑物提取[J]. 测绘学报, 2014, 43(5): 514-520. HU Rong-ming, HUANG Xiao-bing, HUANG Yuan-cheng. An enhanced morphological building index for buidling extraction from high-resolution image[J]. Acta Geodaetica et Cartographica Sinica, 2014, 43(5): 514-520. |
| [19] |
杜培军, 谭琨, 夏俊士, 等. 城市环境遥感方法与实践[M]. 北京: 科学出版社, 2013: 208–223.
|
| [20] |
周亚男, 骆剑承, 程熙, 等. 多特征融入的自适应遥感影像多尺度分割[J]. 武汉大学学报: 信息科学版, 2013, 38(1): 19-22. ZHOU Ya-nan, LUO Jian-cheng, CHENG Xi, et al. Land use and land cover classification and verification in Northern Shaanxi Loess Plateau[J]. Geomatics and Information Science of Wuhan University, 2013, 38(1): 19-22. |