基于自适应课程强化学习的多无人艇对抗围捕决策
Decision-making for multi-USV adversarial encirclement based on adaptive curriculum reinforcement learning
基于自适应课程强化学习的多无人艇对抗围捕决策 |
| 陈浪,刘增力,赵宣植 |
|
Decision-making for multi-USV adversarial encirclement based on adaptive curriculum reinforcement learning |
| Lang CHEN,Zengli LIU,Xuanzhi ZHAO |
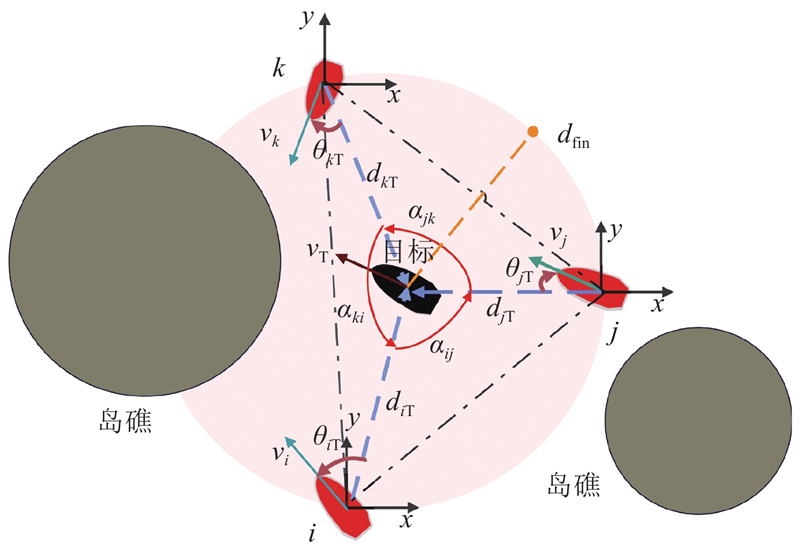
| 图 2 围捕成功的约束条件示意图 |
| Fig.2 Schematic diagram of constraints for successful encirclement |
|
|