动态环境无人机导航的安全分层强化学习框架
Safe hierarchical reinforcement learning framework for dynamic UAV navigation
动态环境无人机导航的安全分层强化学习框架 |
| 商益铭,杜昌平,杨睿,方天睿,杜泽安,郑耀 |
|
Safe hierarchical reinforcement learning framework for dynamic UAV navigation |
| Yiming SHANG,Changping DU,Rui YANG,Tianrui FANG,Ze’an DU,Yao ZHENG |
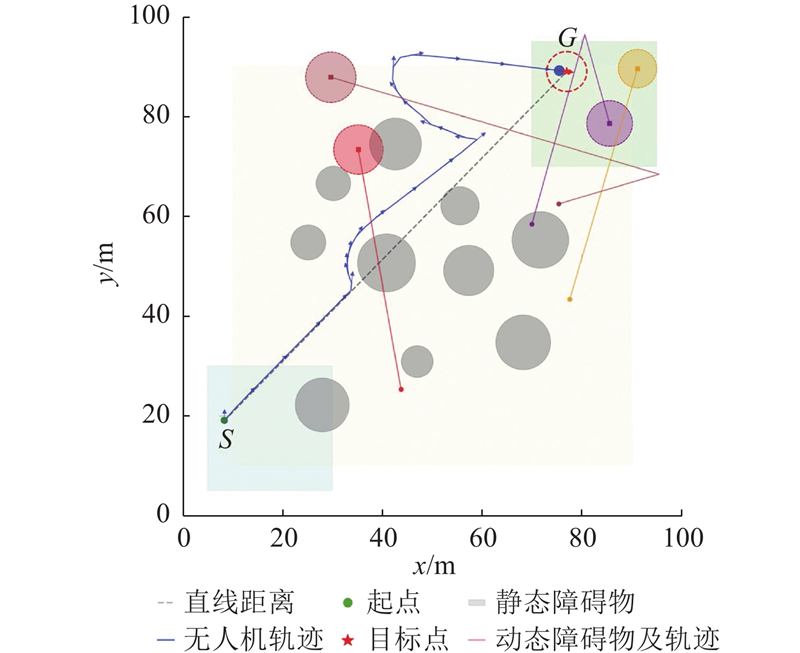
| 图 6 完整框架实验中无人机的路径 |
| Fig.6 Path of UAV in complete framework experiment |
|
|