基于简化概率选择框架的双足机器人模仿学习
Imitation learning for bipedal robots based on simplified probabilistic framework for options
基于简化概率选择框架的双足机器人模仿学习 |
| 薛雯,赵硕,李永强 |
|
Imitation learning for bipedal robots based on simplified probabilistic framework for options |
| Wen XUE,Shuo ZHAO,Yongqiang LI |
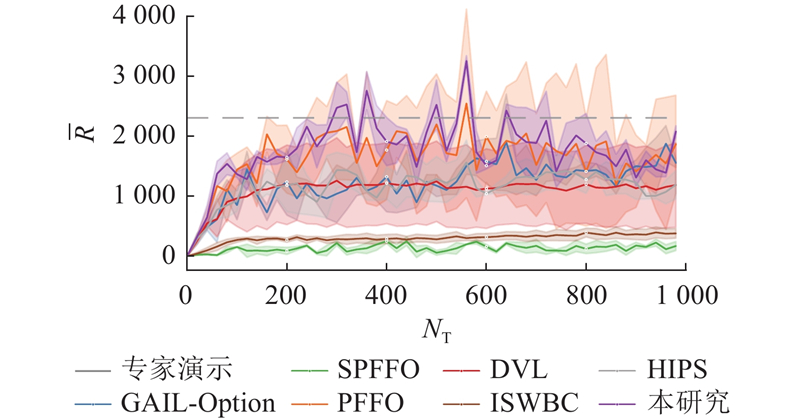
| 图 3 不同模仿学习方法在双足机器人控制任务中的训练性能对比 |
| Fig.3 Training performance comparison of different imitation learning methods in bipedal robot control task |
|
|