基于简化概率选择框架的双足机器人模仿学习
Imitation learning for bipedal robots based on simplified probabilistic framework for options
基于简化概率选择框架的双足机器人模仿学习 |
| 薛雯,赵硕,李永强 |
|
Imitation learning for bipedal robots based on simplified probabilistic framework for options |
| Wen XUE,Shuo ZHAO,Yongqiang LI |
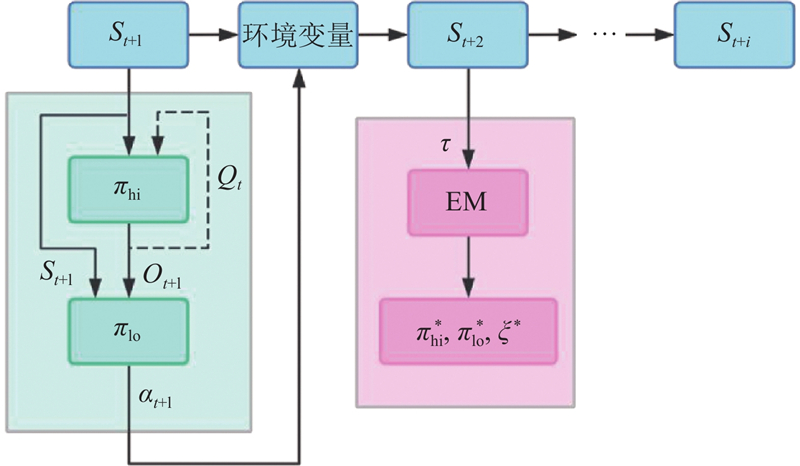
| 图 1 简化概率选择框架策略模型结构图 |
| Fig.1 Strategy model structure of simplified probabilistic framework for options |
|
|