线控转向系统线性自抗扰控制器的群智能优化
Swarm intelligence optimization of linear active disturbance rejection controller for steer-by-wire system
线控转向系统线性自抗扰控制器的群智能优化 |
| 魏萱,黄鹤,杨澜,王会峰,高涛 |
|
Swarm intelligence optimization of linear active disturbance rejection controller for steer-by-wire system |
| Xuan WEI,He HUANG,Lan YANG,Huifeng WANG,Tao GAO |
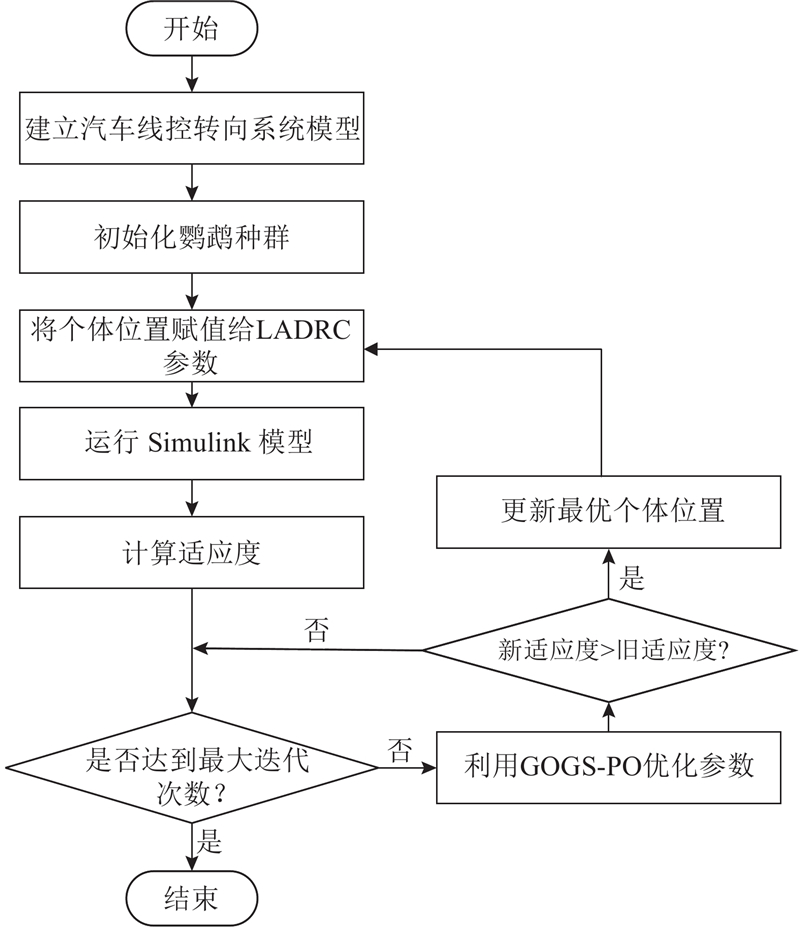
| 图 7 GOGS-PO-LADRC的参数整定过程 |
| Fig.7 Parameter tuning process of GOGS-PO-LADRC |
|
|