动态场景下融合YOLOv11n目标检测的优化ORB-SLAM3算法
Optimized ORB-SLAM3 algorithm incorporating YOLOv11n object detection for dynamic scenes
动态场景下融合YOLOv11n目标检测的优化ORB-SLAM3算法 |
| 谢章郁,杨杰,欧阳嗣源,曾阳剑 |
|
Optimized ORB-SLAM3 algorithm incorporating YOLOv11n object detection for dynamic scenes |
| Zhangyu XIE,Jie YANG,Siyuan OUYANG,Yangjian ZENG |
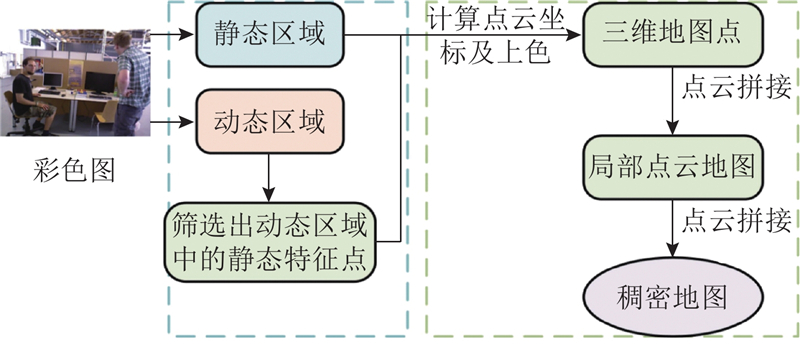
| 图 9 稠密地图重建流程 |
| Fig.9 Workflow of dense map reconstruction |
|
|