基于改进粒子群算法的冗余机器人喷涂轨迹优化
Spraying trajectory optimization for redundant robots based on improved particle swarm algorithm
基于改进粒子群算法的冗余机器人喷涂轨迹优化 |
| 钟艺鹏,沙建军,张一飞,杨汶龙,殷婷,马祥龙 |
|
Spraying trajectory optimization for redundant robots based on improved particle swarm algorithm |
| Yipeng ZHONG,Jianjun SHA,Yifei ZHANG,Wenlong YANG,Ting YIN,Xianglong MA |
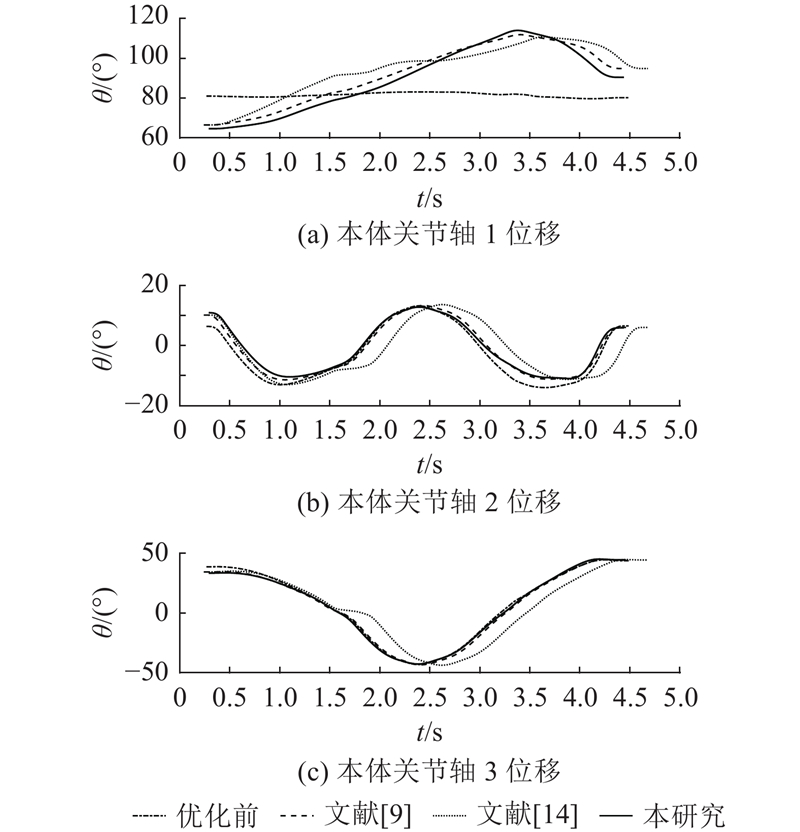
| 图 13 算法优化前后冗余机器人本体轴位移对比 (曲线喷涂) |
| Fig.13 Base-axis displacement comparison of redundant robot before and after algorithm optimization (curved spraying task) |
|
|