基于可达集和强化学习的智能汽车决策规划
Decision-making and planning of intelligent vehicle based on reachable set and reinforcement learning
基于可达集和强化学习的智能汽车决策规划 |
| 高洪伟,尚秉旭,张鑫康,王洪峰,何维,裴晓飞 |
|
Decision-making and planning of intelligent vehicle based on reachable set and reinforcement learning |
| Hongwei GAO,Bingxu SHANG,Xinkang ZHANG,Hongfeng WANG,Wei HE,Xiaofei PEI |
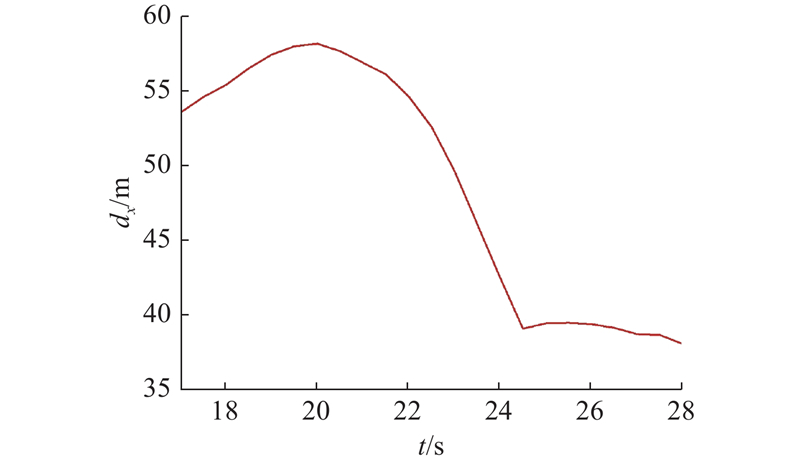
| 图 11 典型场景下自车与前向车距结果 |
| Fig.11 Results of forward vehicle distance from vehicle in a typical scenario |
|
|