工业机器人去冗余测量与考虑不确定度的误差补偿
Industrial robot de-redundant measurement and error compensation considering uncertainty
工业机器人去冗余测量与考虑不确定度的误差补偿 |
| 司泽轩,张军,刘宇庭,吕贺,郭世杰 |
|
Industrial robot de-redundant measurement and error compensation considering uncertainty |
| Zexuan SI,Jun ZHANG,Yuting LIU,He LV,Shijie GUO |
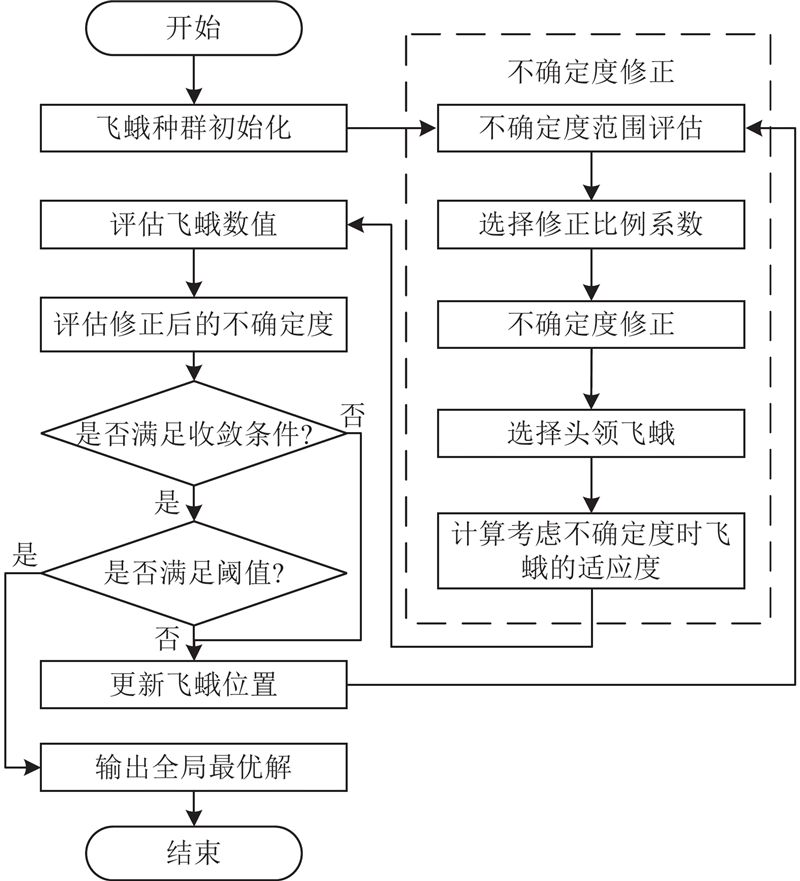
| 图 7 嵌套补偿算法流程 |
| Fig.7 Nested compensation algorithm flow chart |
|
|