空中作业机器人系统显式时间自适应跟踪控制
Explicit-time adaptive tracking control for aerial manipulator systems
空中作业机器人系统显式时间自适应跟踪控制 |
| 刘宜成,马翔,严文 |
|
Explicit-time adaptive tracking control for aerial manipulator systems |
| Yicheng LIU,Xiang MA,Wen YAN |
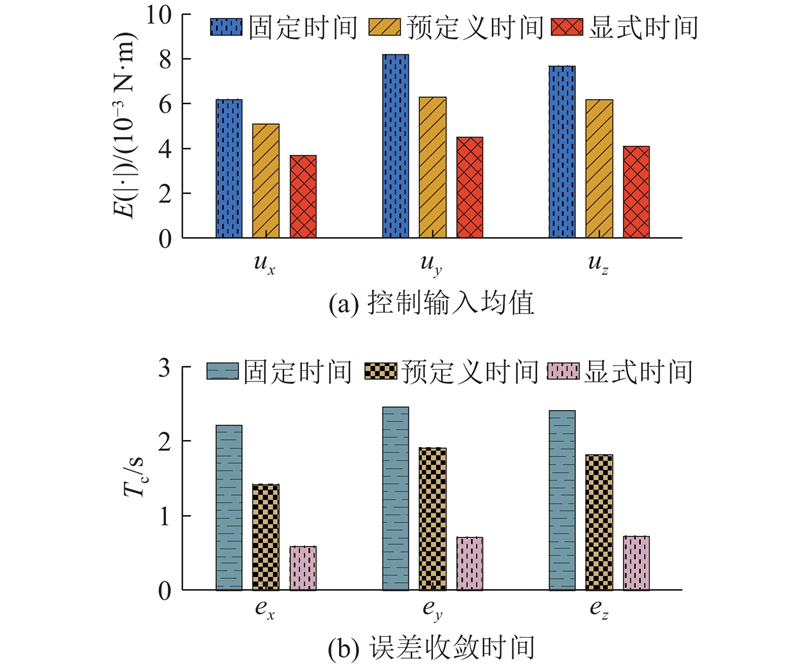
| 图 11 位置跟踪仿真实验量化结果 |
| Fig.11 Quantitative results of position tracking simulation experiment |
|
|