用于多无人机协同路径规划的改进黏菌蜂群算法
Improved slime mould bee colony algorithm for multi-UAVs cooperative path planning
用于多无人机协同路径规划的改进黏菌蜂群算法 |
| 熊慧,葛邦鲁,刘近贞,王家兴 |
|
Improved slime mould bee colony algorithm for multi-UAVs cooperative path planning |
| Hui XIONG,Banglu GE,Jinzhen LIU,Jiaxing WANG |
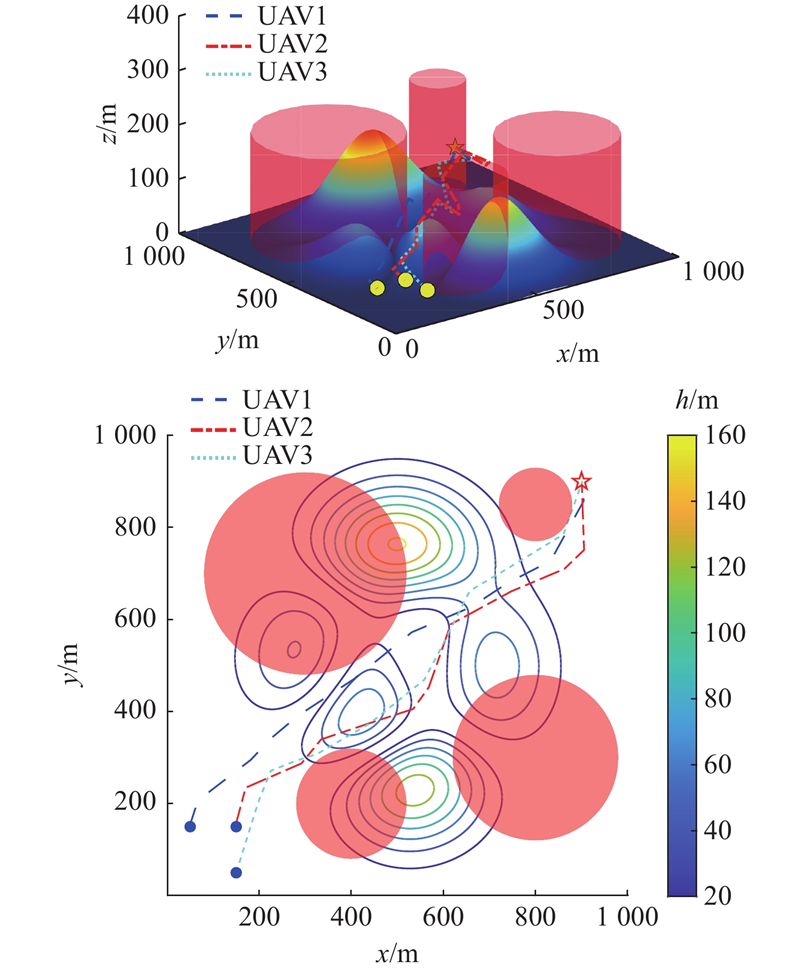
| 图 7 场景2的路径规划结果 |
| Fig.7 Path planning result of scenario 2 |
|
|