基于三维视觉的软体机器人实时定位与控制
Real-time positioning and control of soft robot based on three-dimensional vision
基于三维视觉的软体机器人实时定位与控制 |
| 张弘,张学成,王国强,顾潘龙,江楠 |
|
Real-time positioning and control of soft robot based on three-dimensional vision |
| Hong ZHANG,Xuecheng ZHANG,Guoqiang WANG,Panlong GU,Nan JIANG |
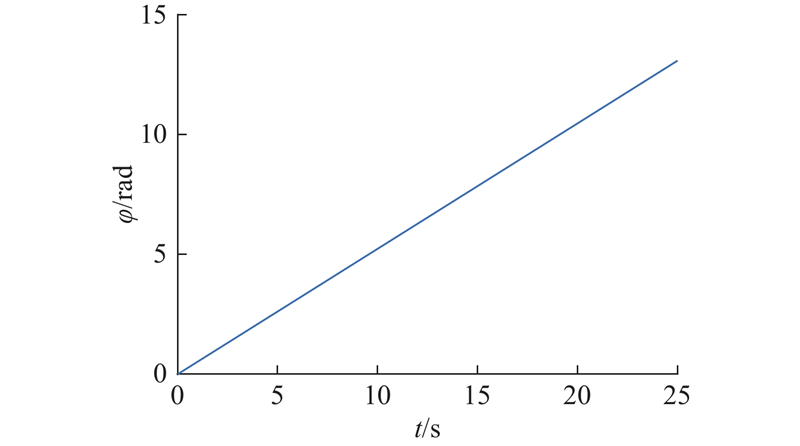
| 图 17 偏转运动实验过程中的机械臂末端速度 |
| Fig.17 End velocity of robotic arm during experiment of deflection |
|
|