基于改进深度强化学习算法的农业机器人路径规划
Path planning of agricultural robots based on improved deep reinforcement learning algorithm
基于改进深度强化学习算法的农业机器人路径规划 |
| 赵威,张万枝,侯加林,侯瑞,李玉华,赵乐俊,程进 |
|
Path planning of agricultural robots based on improved deep reinforcement learning algorithm |
| Wei ZHAO,Wanzhi ZHANG,Jialin HOU,Rui HOU,Yuhua LI,Lejun ZHAO,Jin Cheng |
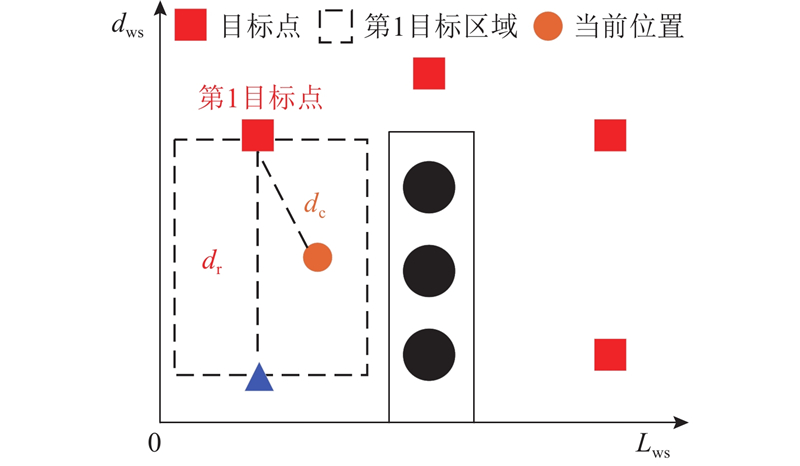
| 图 4 作业场景目标点区域划分图 |
| Fig.4 Area division diagram of target point of scenario |
|
|