基于多目标约束的无人机光顺路径生成全局优化方法
Multi-objective constraint-based smooth path generation for UAVs global optimization method
基于多目标约束的无人机光顺路径生成全局优化方法 |
| 廖榆信,王伟,滕卫明,贺海晏,王战,王进 |
|
Multi-objective constraint-based smooth path generation for UAVs global optimization method |
| Yuxin LIAO,Wei WANG,Weiming TENG,Haiyan HE,Zhan WANG,Jin WANG |
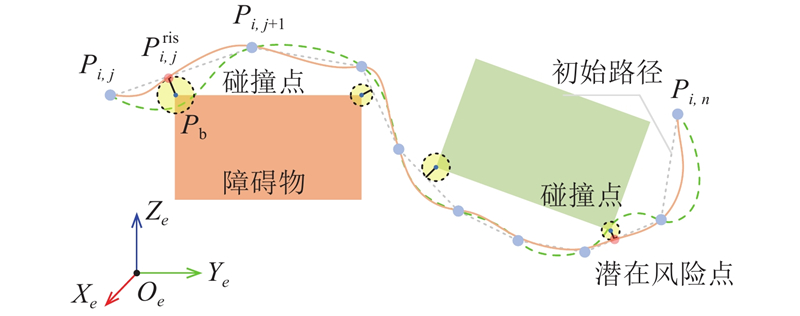
| 图 8 以潜在风险点为过渡路径的插值方法 |
| Fig.8 Interpolation method using potential risk points as transition paths |
|
|