融合自适应势场法和深度强化学习的三维水下AUV路径规划方法
3D underwater AUV path planning method integrating adaptive potential field method and deep reinforcement learning
融合自适应势场法和深度强化学习的三维水下AUV路径规划方法 |
| 郝琨,孟璇,赵晓芳,李志圣 |
|
3D underwater AUV path planning method integrating adaptive potential field method and deep reinforcement learning |
| Kun HAO,Xuan MENG,Xiaofang ZHAO,Zhisheng LI |
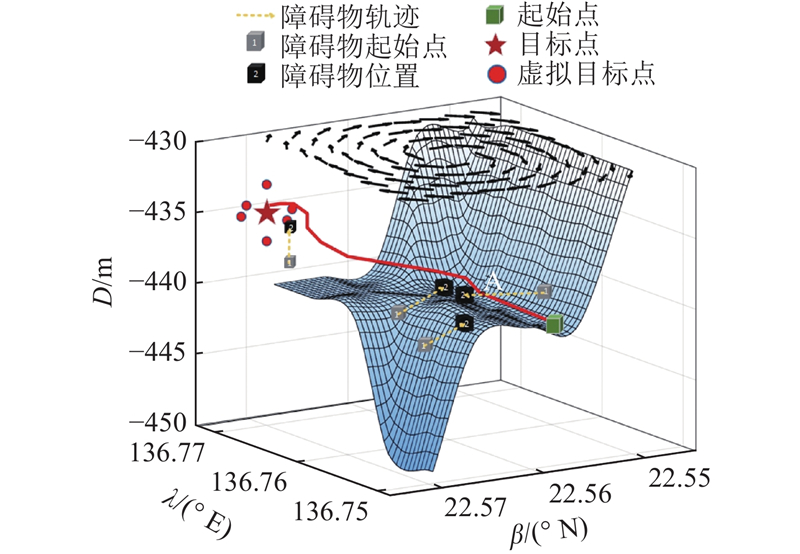
| 图 13 所提路径规划方法的动态避障 |
| Fig.13 Dynamic obstacle avoidance of proposed path planning method |
|
|