基于双目视觉和改进YOLOv8的动态三维重建方法
Dynamic 3D reconstruction method using binocular vision and improved YOLOv8
基于双目视觉和改进YOLOv8的动态三维重建方法 |
| 何婧瑶,李鹏飞,汪承志,吕振鸣,牟萍 |
|
Dynamic 3D reconstruction method using binocular vision and improved YOLOv8 |
| Jingyao HE,Pengfei LI,Chengzhi WANG,Zhenming LV,Ping MU |
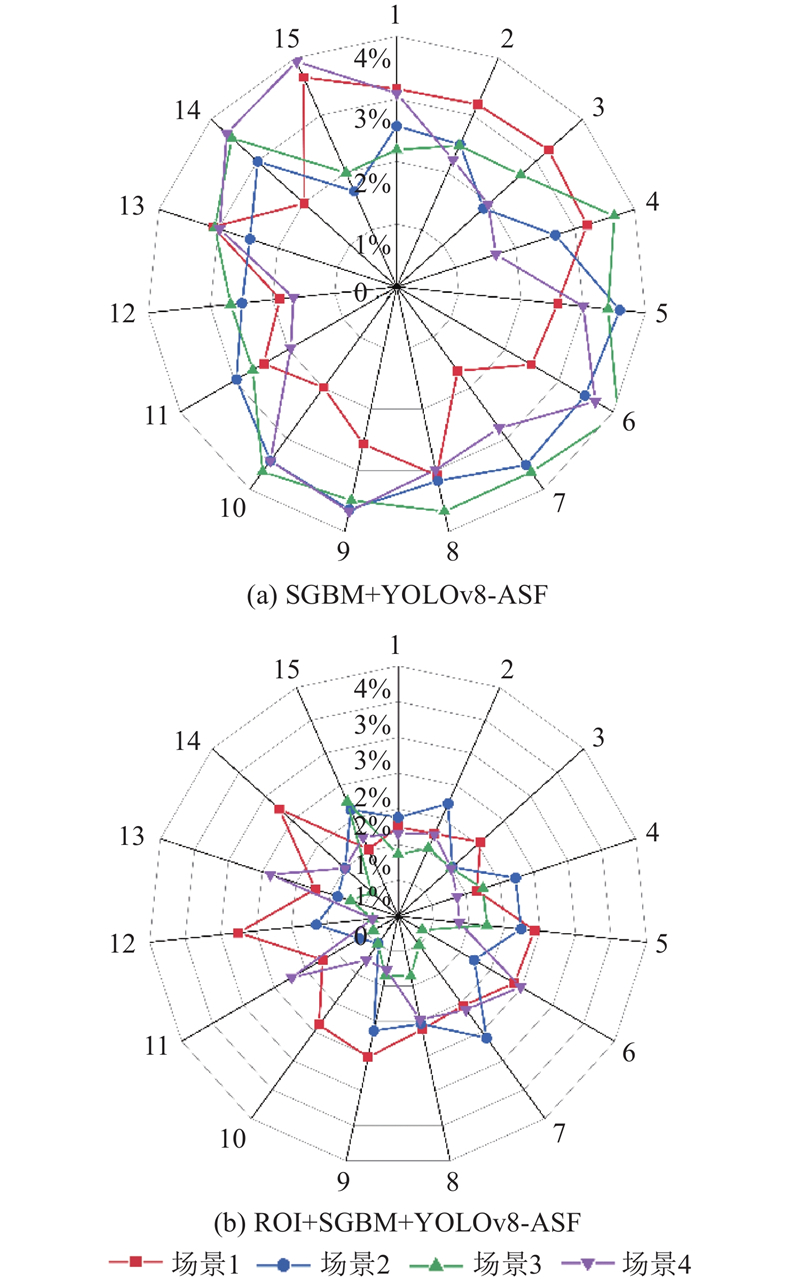
| 图 10 不同算法在4种模拟场景下的特征点匹配精度 |
| Fig.10 Feature point matching accuracy of different algorithms in four simulation scenarios |
|
|