基于EWT-LSTM的工业机器人关节异常检测
EWT-LSTM based industrial robot joint anomaly detection
基于EWT-LSTM的工业机器人关节异常检测 |
| 蒋沁诚,陶建峰,王洋洋,张宇磊,刘成良 |
|
EWT-LSTM based industrial robot joint anomaly detection |
| Qincheng JIANG,Jianfeng TAO,Yangyang WANG,Yulei ZHANG,Chengliang LIU |
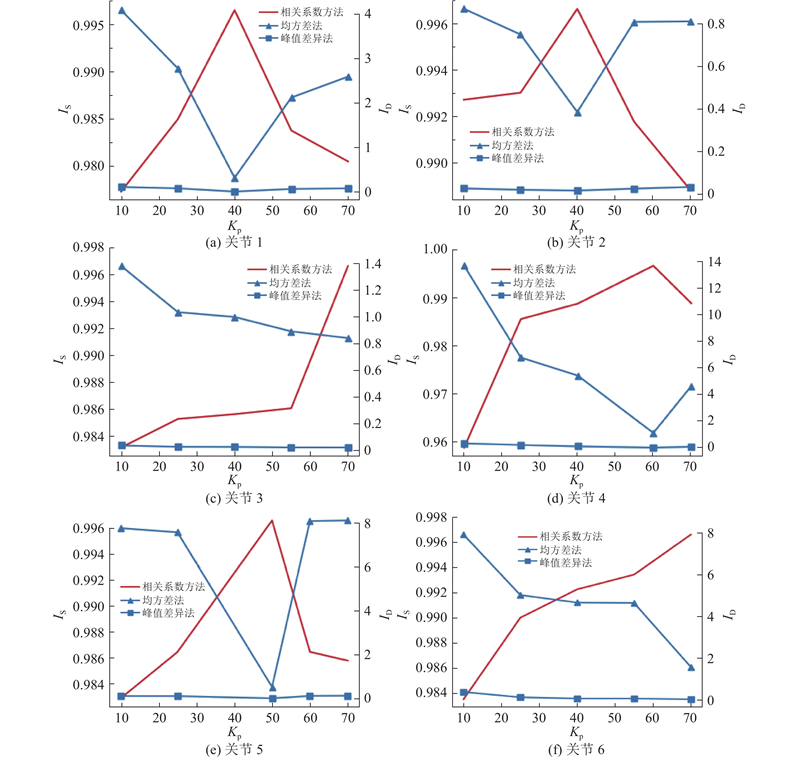
| 图 12 利用3种异常检测方法对工业机器人的6个关节进行异常检测得到的结果 |
| Fig.12 Abnormal detection result of six joints of industrial robot obtained by three abnormal detection methods |
|
|