基于EWT-LSTM的工业机器人关节异常检测
EWT-LSTM based industrial robot joint anomaly detection
基于EWT-LSTM的工业机器人关节异常检测 |
| 蒋沁诚,陶建峰,王洋洋,张宇磊,刘成良 |
|
EWT-LSTM based industrial robot joint anomaly detection |
| Qincheng JIANG,Jianfeng TAO,Yangyang WANG,Yulei ZHANG,Chengliang LIU |
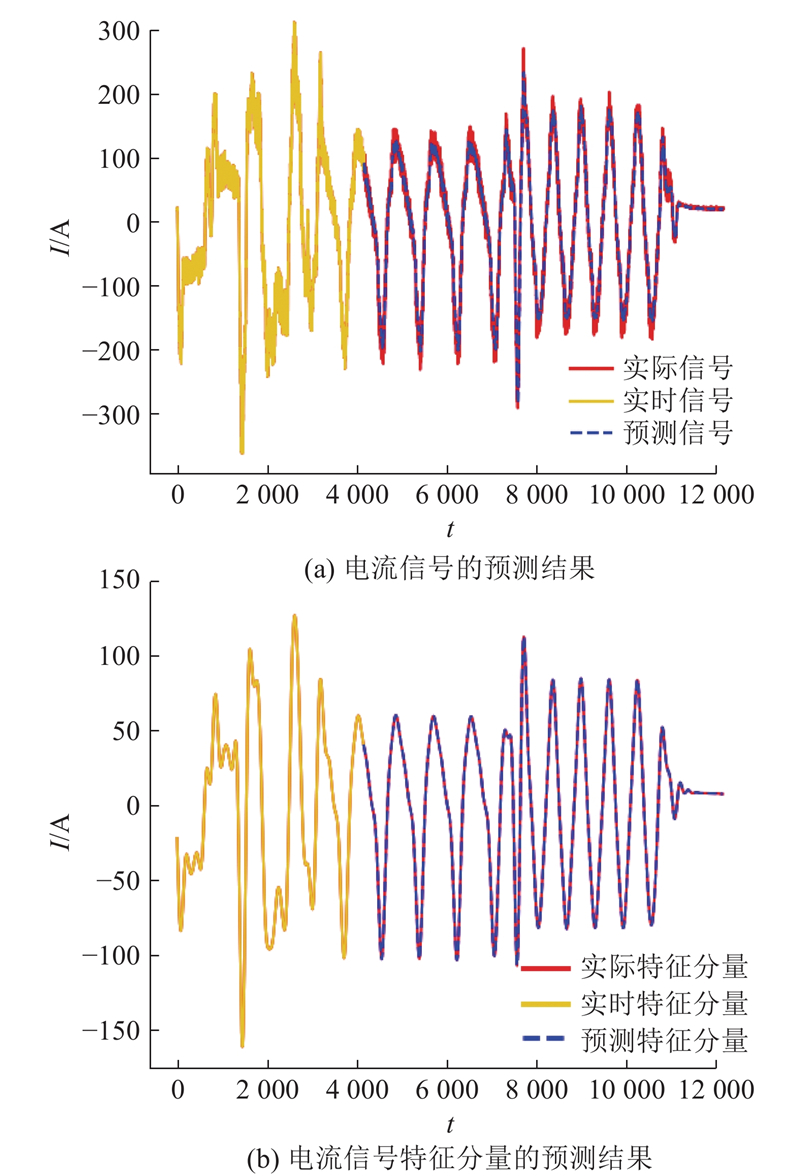
| 图 11 模型关节1不同输入预测结果的对比 |
| Fig.11 Comparison of prediction result for different input of model joint 1 |
|
|