基于混合策略多目标粒子群的异构无人机协同多任务分配
Collaborative multi-task assignment of heterogeneous UAVs based on hybrid strategies based multi-objective particle swarm
基于混合策略多目标粒子群的异构无人机协同多任务分配 |
| 王昱,马春荣,赵明月 |
|
Collaborative multi-task assignment of heterogeneous UAVs based on hybrid strategies based multi-objective particle swarm |
| Yu WANG,Chunrong MA,Mingyue ZHAO |
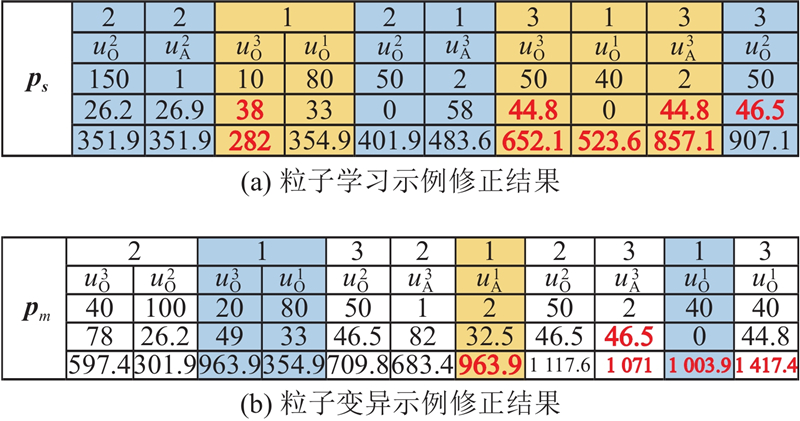
| 图 6 基于约束的粒子修正结果 |
| Fig.6 Correction results of particle based on constraints |
|
|