柔性空间机器人预定义时间自适应滑模控制
Predefined time adaptive sliding mode control for flexible space robot
柔性空间机器人预定义时间自适应滑模控制 |
| 刘宜成,杨迦凌,唐瑞,程靖 |
|
Predefined time adaptive sliding mode control for flexible space robot |
| Yicheng LIU,Jialing YANG,Rui TANG,Jing CHENG |
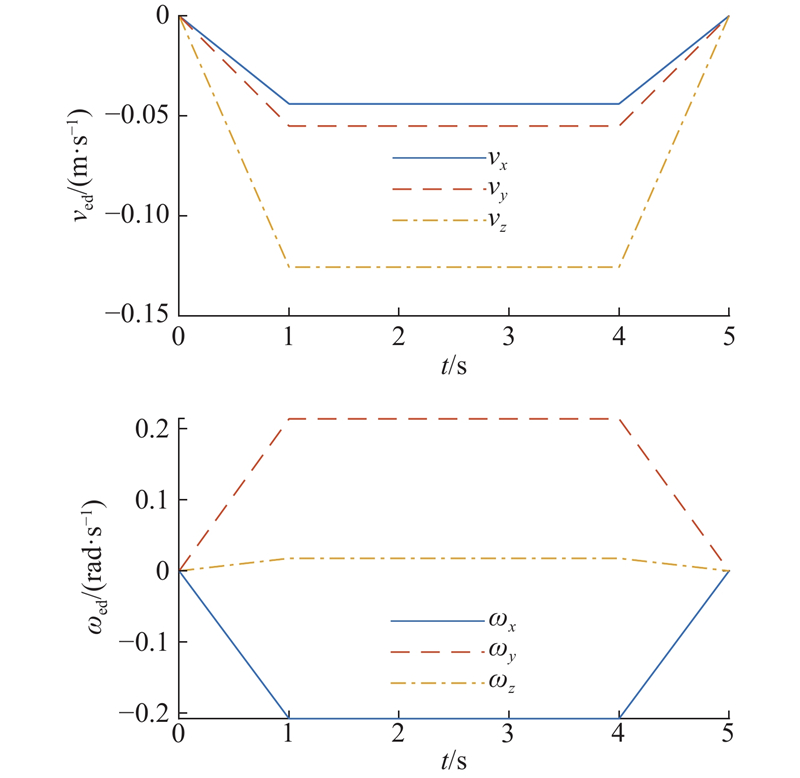
| 图 12 末端的期望速度 |
| Fig.12 Desired velocity of end-effector |
|
|