基于3D关键点的双目视觉物体6D位姿估计
6D pose estimation of binocular vision object based on 3D key point
基于3D关键点的双目视觉物体6D位姿估计 |
| 宁锴旭,陆晴,杨恒,王韶涵 |
|
6D pose estimation of binocular vision object based on 3D key point |
| Kaixu NING,Qing LU,Heng YANG,Shaohan WANG |
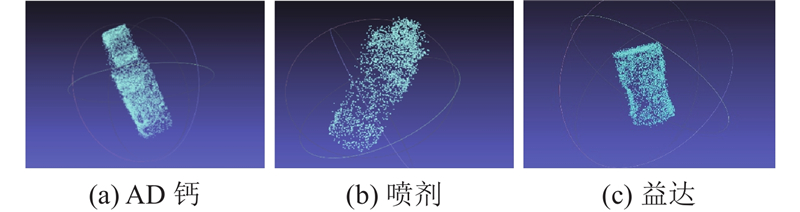
| 图 6 部分物体的稀疏点云模型 |
| Fig.6 Sparse point cloud model of some objects |
|
|