考虑多源混合不确定性的并联机器人降敏设计
Desensitization design for parallel robots under multi-source hybrid uncertainty
考虑多源混合不确定性的并联机器人降敏设计 |
| 陶明哲,徐敬华,张树有,谭建荣 |
|
Desensitization design for parallel robots under multi-source hybrid uncertainty |
| Mingzhe TAO,Jinghua XU,Shuyou ZHANG,Jianrong TAN |
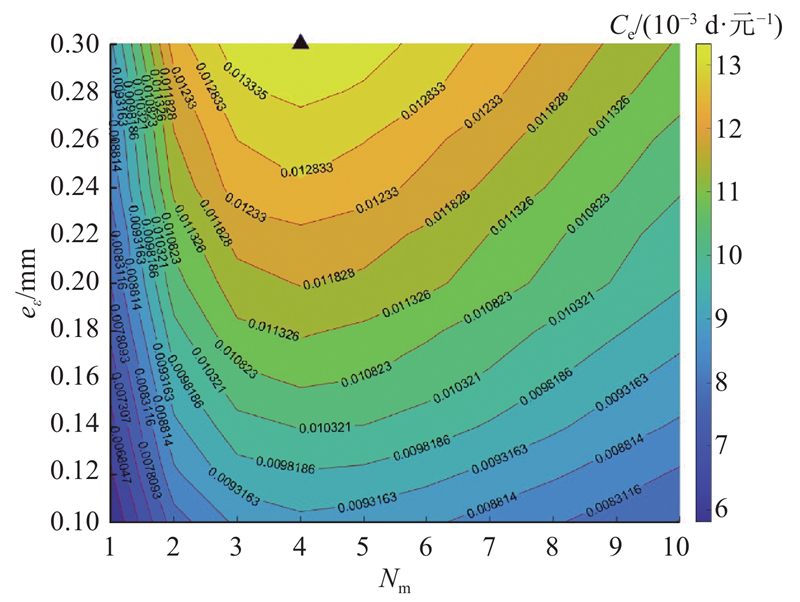
| 图 4 增材制造并联机器人预防性维保收益的计算结果 |
| Fig.4 Yields of preventive maintenance for additive manufacturing parallel robot |
|
|