基于模型预测的四足机器人运动控制
Motion control of quadruped robot based on model prediction
基于模型预测的四足机器人运动控制 |
| 秦海鹏,秦瑞,施晓芬,朱小明 |
|
Motion control of quadruped robot based on model prediction |
| Haipeng QIN,Rui QIN,Xiaofen SHI,Xiaoming ZHU |
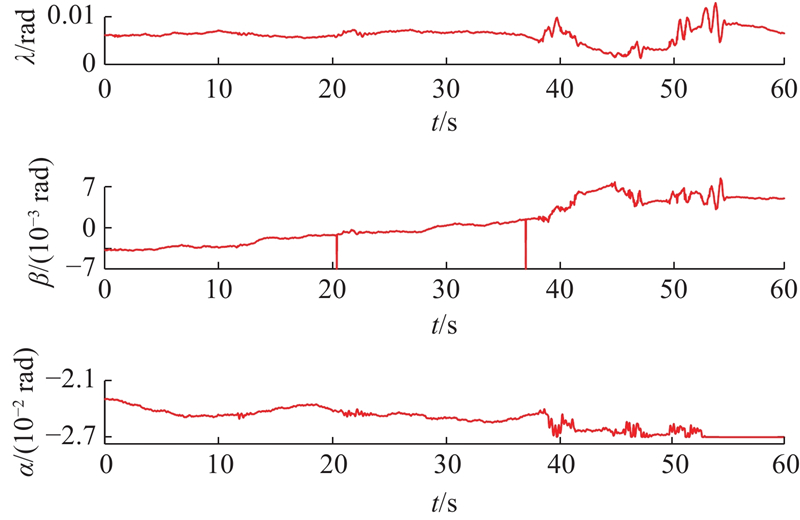
| 图 17 姿态角曲线 |
| Fig.17 Curve of attitude angle |
|
|