仿生六足折纸机器人结构设计与运动分析
Structure design and motion analysis of bionic hexapod origami robot
仿生六足折纸机器人结构设计与运动分析 |
| 曹东兴,贾艳超,郭翔鹰,毛佳佳 |
|
Structure design and motion analysis of bionic hexapod origami robot |
| Dongxing CAO,Yanchao JIA,Xiangying GUO,Jiajia MAO |
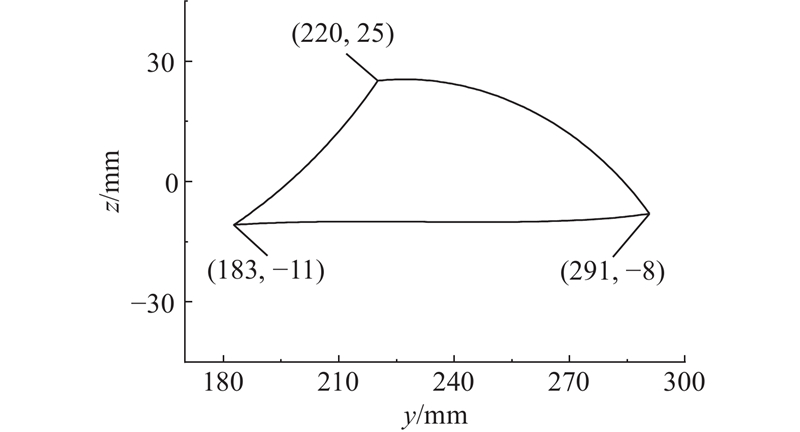
| 图 21 增大机器人抬腿高度后的足端轨迹 |
| Fig.21 Trajectory of foot after increasing robot’s leg lifting height |
|
|