全齿轮耦合机器人齿侧间隙建模与公差仿真
Gear backlash modeling and tolerance simulation of fully gear-coupled robot
全齿轮耦合机器人齿侧间隙建模与公差仿真 |
| 蒋君侠,仲笑欧,吕林灿,来建良,金丁灿 |
|
Gear backlash modeling and tolerance simulation of fully gear-coupled robot |
| Junxia JIANG,Xiaoou ZHONG,Lincan LV,Jianliang LAI,Dingcan JIN |
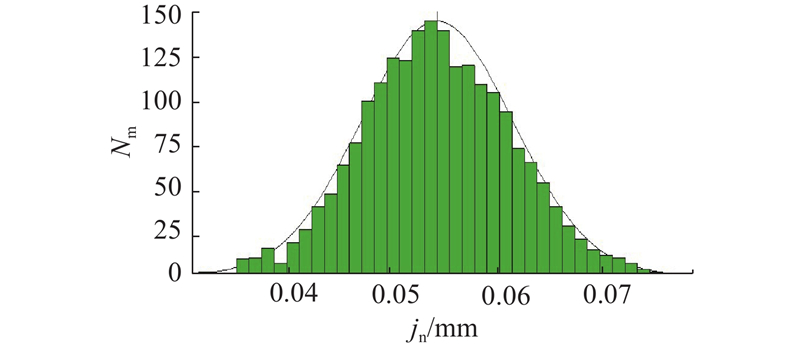
| 图 6 圆柱法向侧隙的仿真结果 |
| Fig.6 Simulation result of cylindrical normal backlash |
|
|