动态环境下自主机器人的双机制切向避障
Dual-mechanism tangential obstacle avoidance of autonomous robots in dynamic environment
动态环境下自主机器人的双机制切向避障 |
| 章一鸣,姚文广,陈海进 |
|
Dual-mechanism tangential obstacle avoidance of autonomous robots in dynamic environment |
| Yiming ZHANG,Wenguang YAO,Haijin CHEN |
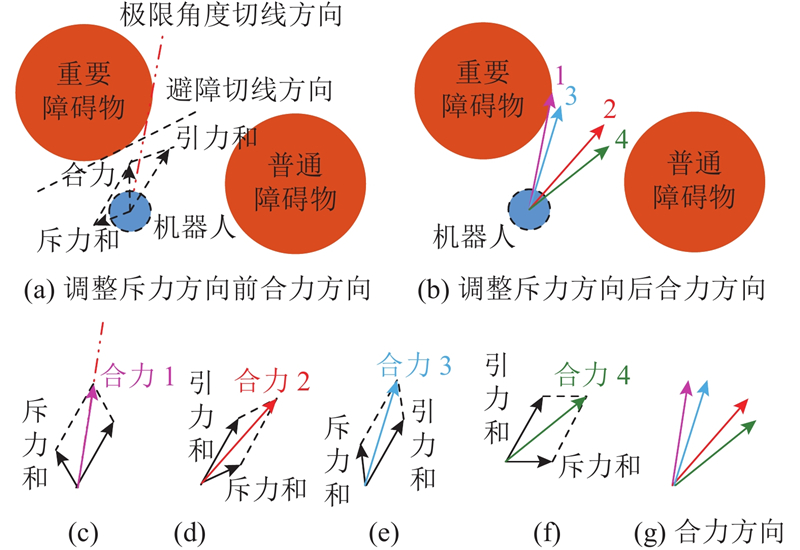
| 图 8 斥力调整方向后的合力方向分析 |
| Fig.8 Analysis of resultant force direction after repulsive force adjustment |
|
|