动态环境下自主机器人的双机制切向避障
Dual-mechanism tangential obstacle avoidance of autonomous robots in dynamic environment
动态环境下自主机器人的双机制切向避障 |
| 章一鸣,姚文广,陈海进 |
|
Dual-mechanism tangential obstacle avoidance of autonomous robots in dynamic environment |
| Yiming ZHANG,Wenguang YAO,Haijin CHEN |
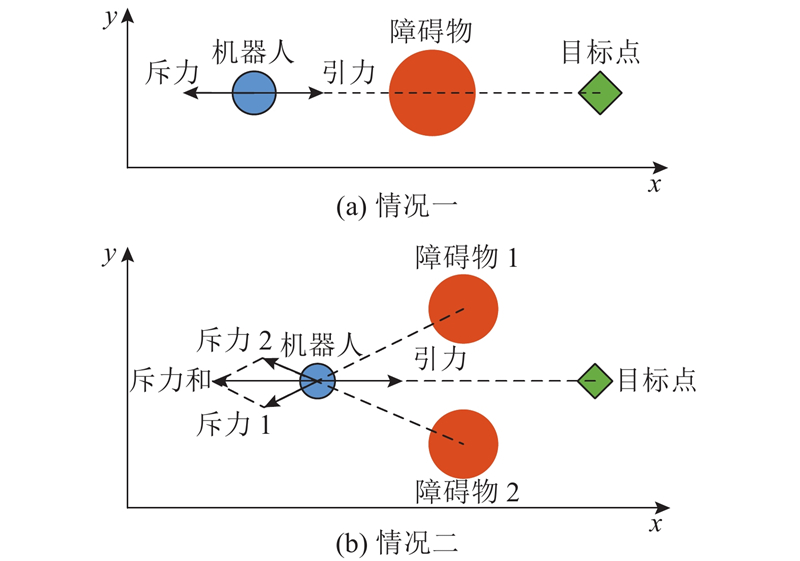
| 图 1 传统人工势场法的局部极小值陷阱 |
| Fig.1 Local minimum trap of traditional artificial potential field method |
|
|