基于扩张滑模观测器的电液伺服系统鲁棒控制
Extended sliding mode observer-based robust tracking control scheme for electro-hydraulic servo systems
基于扩张滑模观测器的电液伺服系统鲁棒控制 |
| 臧万顺,沈刚,赵军,臧克江 |
|
Extended sliding mode observer-based robust tracking control scheme for electro-hydraulic servo systems |
| Wanshun ZANG,Gang SHEN,Jun ZHAO,Kejiang ZANG |
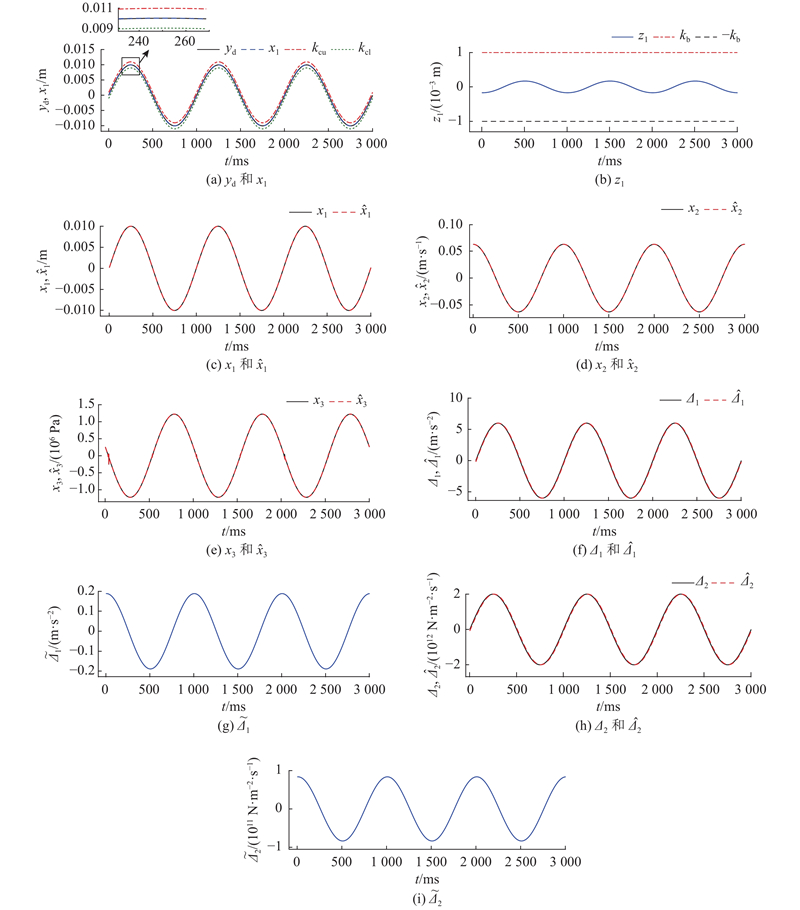
| 图 5 仿真中所提出的控制器的性能 |
| Fig.5 Performance of proposed controller in simulation study |
|
|