轻量化机器人抓取位姿实时检测算法
Light-weight algorithm for real-time robotic grasp detection
轻量化机器人抓取位姿实时检测算法 |
| 宋明俊,严文,邓益昭,张俊然,涂海燕 |
|
Light-weight algorithm for real-time robotic grasp detection |
| Mingjun SONG,Wen YAN,Yizhao DENG,Junran ZHANG,Haiyan TU |
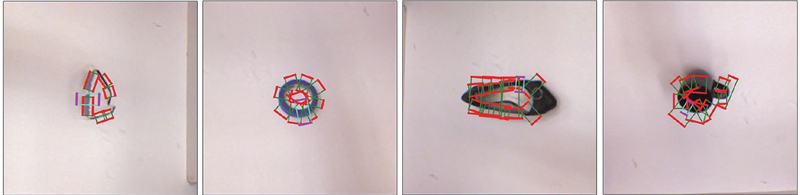
| 图 12 Cornell数据集的不完全标注 |
| Fig.12 Incomplete labelled ground truth of Cornell grasping dataset |
|
|