B样条技术与遗传算法融合的全局路径规划
Global path planning with integration of B-spline technique and genetic algorithm
B样条技术与遗传算法融合的全局路径规划 |
| 陈丽芳,杨火根,陈智超,杨杰 |
|
Global path planning with integration of B-spline technique and genetic algorithm |
| Lifang CHEN,Huogen YANG,Zhichao CHEN,Jie YANG |
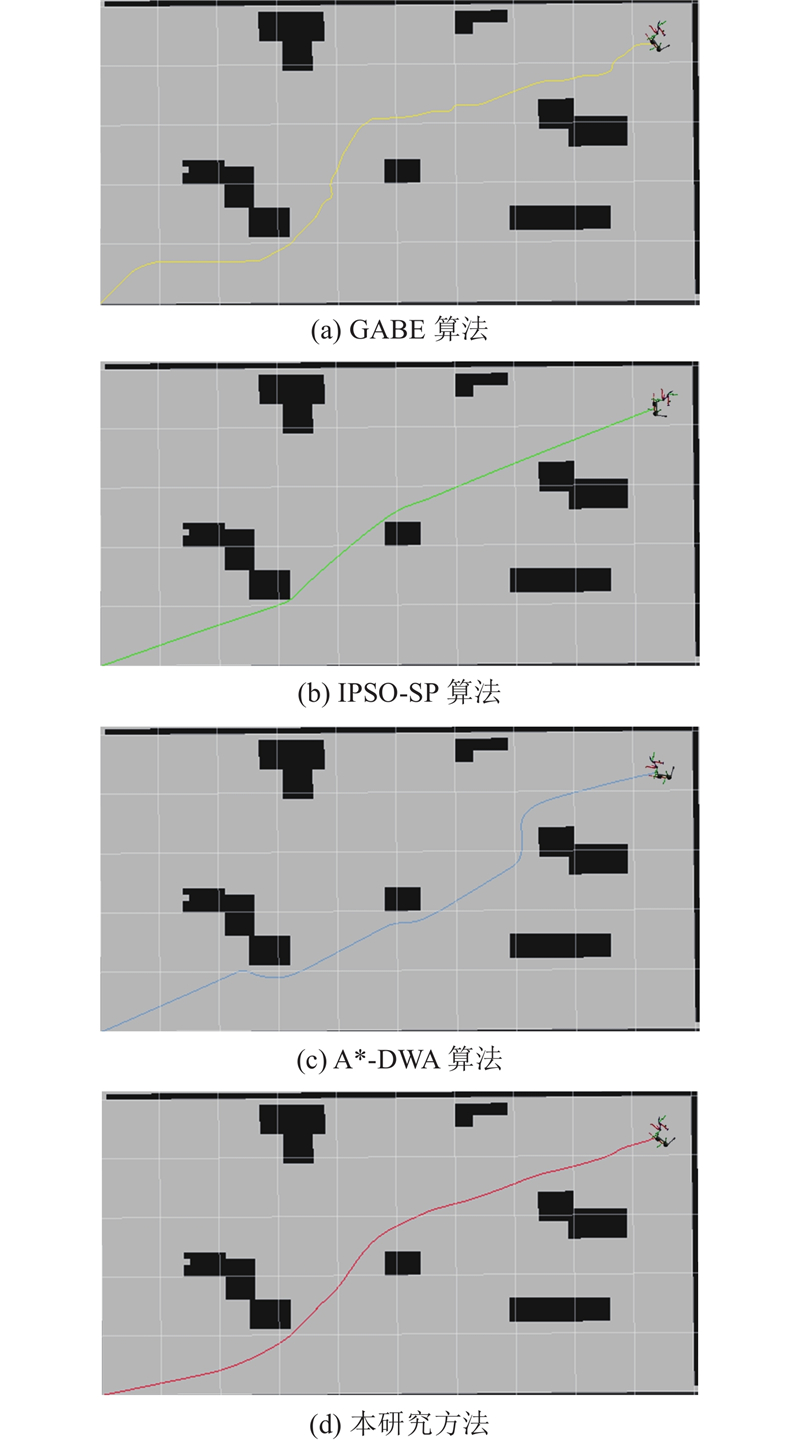
| 图 14 4种算法在ROS机器人上的路径可视化结果 |
| Fig.14 Visualization results of four algorithms on ROS robot for path planning |
|
|