考虑个体习惯的轮椅机器人人机共享避障方法
Human-machine shared obstacle avoidance method for wheelchair robot considering individual habit
考虑个体习惯的轮椅机器人人机共享避障方法 |
| 王义娜,曹晨,杨佳琪,俞彦军,傅国强,王硕玉 |
|
Human-machine shared obstacle avoidance method for wheelchair robot considering individual habit |
| Yina WANG,Chen CAO,Jiaqi YANG,Yanjun YU,Guoqiang FU,Shuoyu WANG |
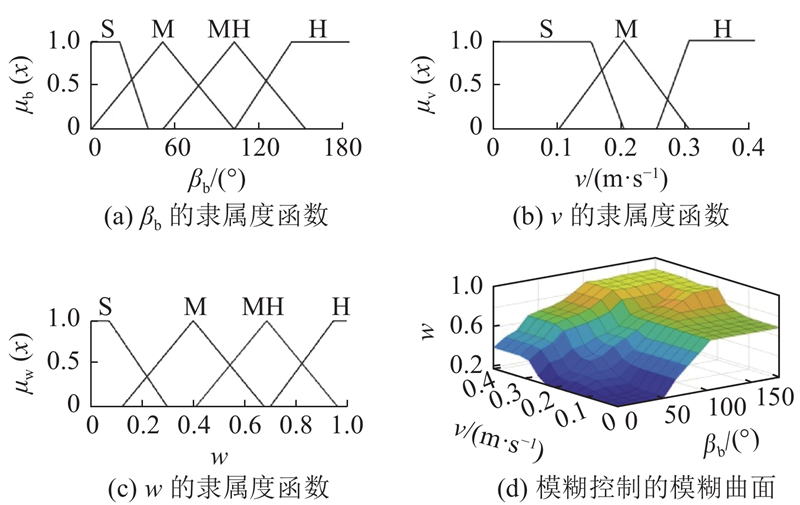
| 图 6 共享模糊控制器的隶属度函数 |
| Fig.6 Membership function of shared fuzzy controller |
|
|