基于改进卡尔曼滤波的轻量级激光惯性里程计
Lightweight LiDAR-IMU odometry based on improved Kalman filter
基于改进卡尔曼滤波的轻量级激光惯性里程计 |
| 罗钒睿,刘振宇,任佳辉,李笑宇,程阳 |
|
Lightweight LiDAR-IMU odometry based on improved Kalman filter |
| Fanrui LUO,Zhenyu LIU,Jiahui REN,Xiaoyu LI,Yang CHENG |
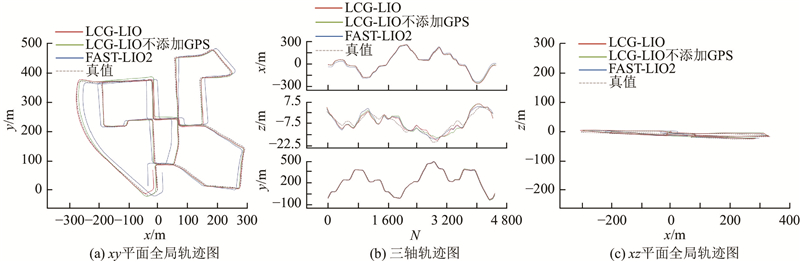
| 图 6 KITTI运行轨迹图 |
| Fig.6 KITTI operation trajectory |
|
|