基于局部信息融合的点云3D目标检测算法
Point cloud 3D object detection algorithm based on local information fusion
基于局部信息融合的点云3D目标检测算法 |
| 张林杰,柴志雷,王宁 |
|
Point cloud 3D object detection algorithm based on local information fusion |
| Linjie ZHANG,Zhilei CHAI,Ning WANG |
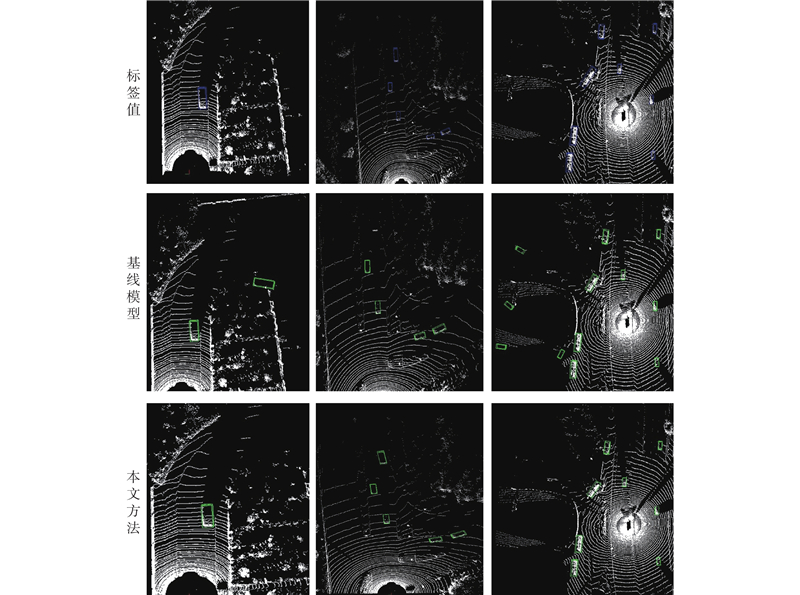
| 图 4 KITTI和Waymo数据集的可视化结果对比展示 |
| Fig.4 Comparison of visualization results between KITTI and Waymo datasets |
|
|