无先验模型曲面的机器人打磨主动自适应在线轨迹预测方法
Active adaptive online trajectory prediction for robotic grinding on surface without prior model
无先验模型曲面的机器人打磨主动自适应在线轨迹预测方法 |
| 郭万金,赵伍端,于苏扬,赵立军,曹雏清 |
|
Active adaptive online trajectory prediction for robotic grinding on surface without prior model |
| Wan-jin GUO,Wu-duan ZHAO,Su-yang YU,Li-jun ZHAO,Chu-qing CAO |
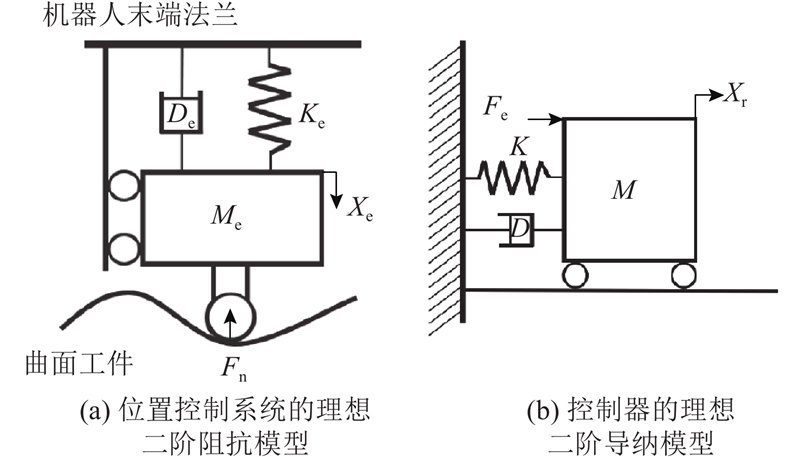
| 图 3 末端执行器位置控制系统和力控制器简化模型 |
| Fig.3 Simplified model of position control system and force controller for end-effector |
|
|