面向口腔种植的机器人多姿态轨迹平滑规划
Multi-orientation trajectory smoothing planning of robot for dental implant
面向口腔种植的机器人多姿态轨迹平滑规划 |
| 仲重亮,刘云峰,朱伟东,朱赴东 |
|
Multi-orientation trajectory smoothing planning of robot for dental implant |
| Chong-liang ZHONG,Yun-feng LIU,Wei-dong ZHU,Fu-dong ZHU |
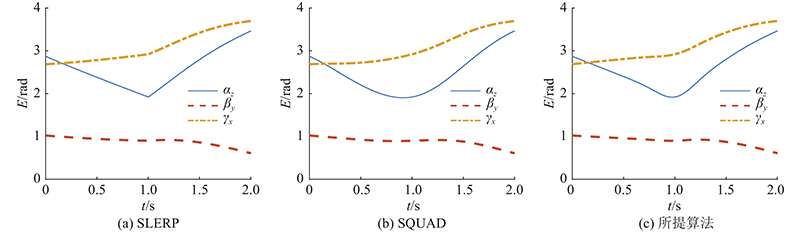
| 图 7 不同算法的机器人笛卡尔空间欧拉角变化 |
| Fig.7 Change of euler angles in robot Cartesian space for different algorithms |
|
|