自对准人工膝关节的人机匹配设计
Human-robot matching design of self-aligning artificial knee joint
自对准人工膝关节的人机匹配设计 |
| 常同立,傅万斌 |
|
Human-robot matching design of self-aligning artificial knee joint |
| Tong-li CHANG,Wan-bin FU |
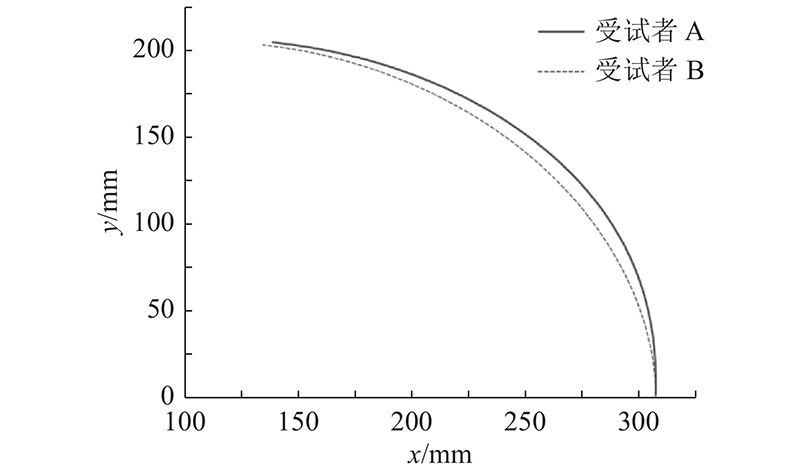
| 图 9 受试者A、B的小腿运动轨迹 |
| Fig.9 Motion trajectories of subjects A and B |
|
|