自对准人工膝关节的人机匹配设计
Human-robot matching design of self-aligning artificial knee joint
自对准人工膝关节的人机匹配设计 |
| 常同立,傅万斌 |
|
Human-robot matching design of self-aligning artificial knee joint |
| Tong-li CHANG,Wan-bin FU |
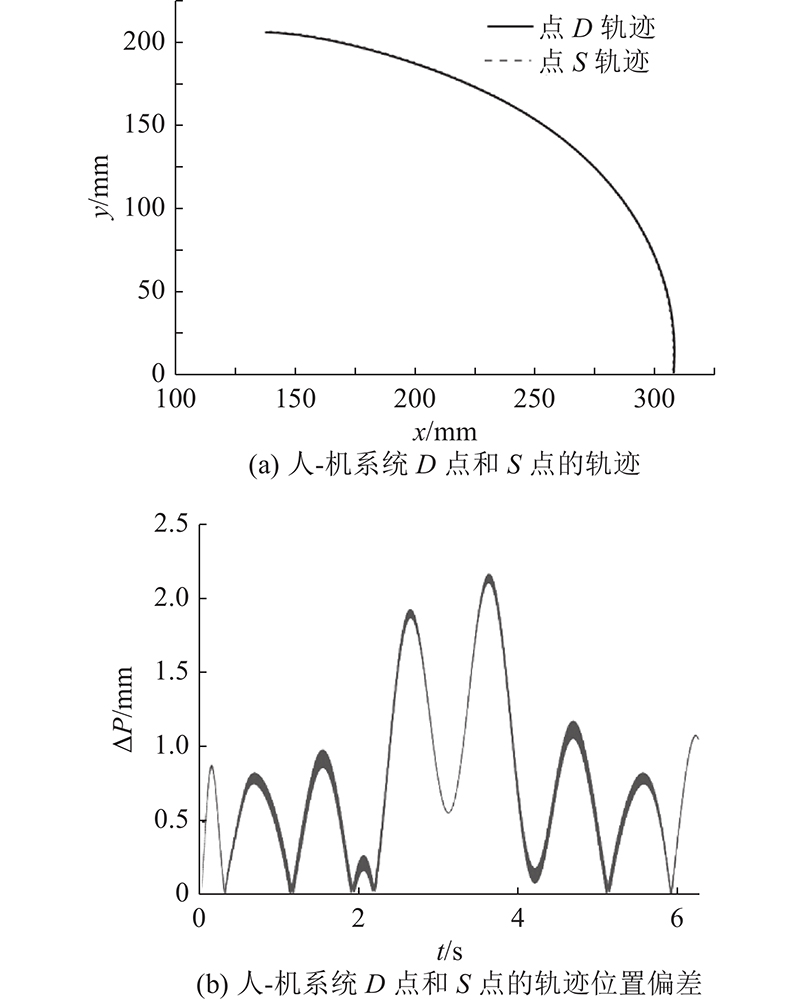
| 图 13 人-机系统D点和S点的轨迹比较 |
| Fig.13 Comparison of D-point and S-point trajectories of human-robot system |
|
|