基于高斯回归学习的场景优化鲁棒预测控制
Scenario optimization robust predictive control via Gaussian regression learning
基于高斯回归学习的场景优化鲁棒预测控制 |
| 熊伟亮,何德峰,王秀丽,周丹 |
|
Scenario optimization robust predictive control via Gaussian regression learning |
| Wei-liang XIONG,De-feng HE,Xiu-li WANG,Dan ZHOU |
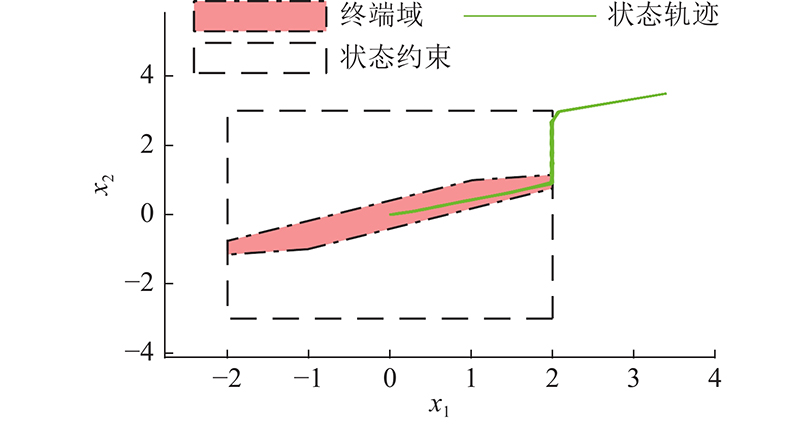
| 图 3 算法1在Pp = 0.1时的10 000条蒙特卡洛状态轨迹 |
| Fig.3 10 000 Monte Carlo state trajectories of algorithm 1 at Pp = 0.1 |
|
|