基于高斯回归学习的场景优化鲁棒预测控制
Scenario optimization robust predictive control via Gaussian regression learning
基于高斯回归学习的场景优化鲁棒预测控制 |
| 熊伟亮,何德峰,王秀丽,周丹 |
|
Scenario optimization robust predictive control via Gaussian regression learning |
| Wei-liang XIONG,De-feng HE,Xiu-li WANG,Dan ZHOU |
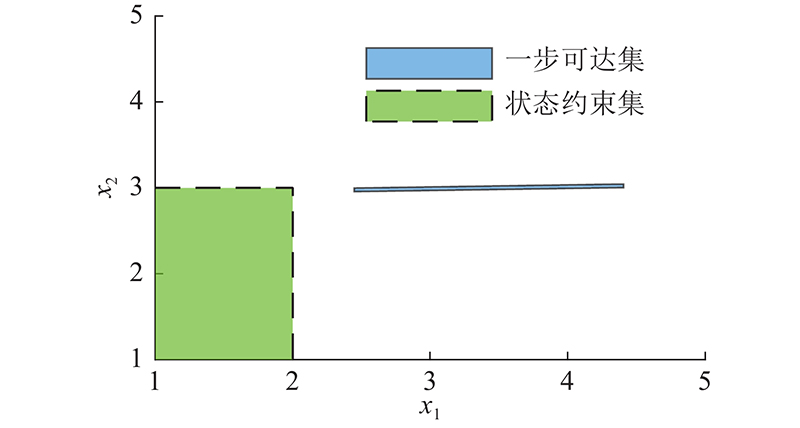
| 图 2 初始状态的一步可达集合与状态约束集合 |
| Fig.2 State constraint set and one-step reachable set of initial state |
|
|