刚柔耦合机械手的抓握姿态和力综合优化方法
Comprehensive optimization of gripping gesture and force of soft-rigid robotic hand
刚柔耦合机械手的抓握姿态和力综合优化方法 |
| 王天磊,冯李航,孙振兴,柯云,李超超,胡记伟 |
|
Comprehensive optimization of gripping gesture and force of soft-rigid robotic hand |
| Tian-lei WANG,Li-hang FENG,Zhen-xing SUN,Yun KE,Chao-chao LI,Ji-wei HU |
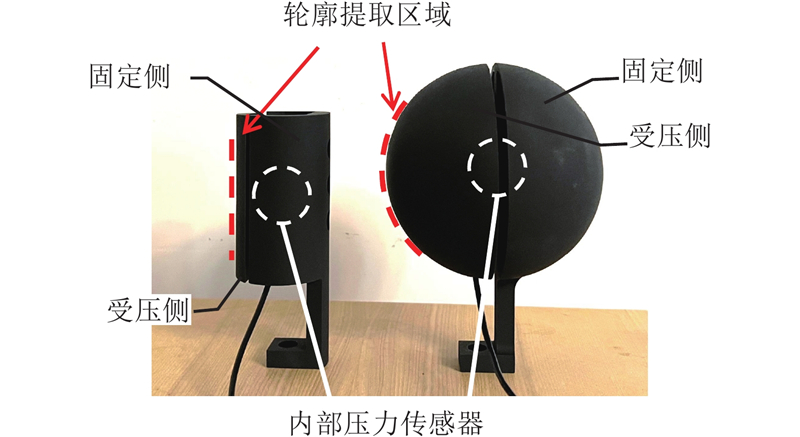
| 图 5 抓握实验测试件结构 |
| Fig.5 Test object structures in grasping experiment |
|
|