基于集成概率模型的变阻抗机器人打磨力控制
Ensemble probabilistic model based variable impedance for robotic grinding force control
基于集成概率模型的变阻抗机器人打磨力控制 |
| 郭万金,赵伍端,利乾辉,赵立军,曹雏清 |
|
Ensemble probabilistic model based variable impedance for robotic grinding force control |
| Wan-jin GUO,Wu-duan ZHAO,Qian-hui LI,Li-jun ZHAO,Chu-qing CAO |
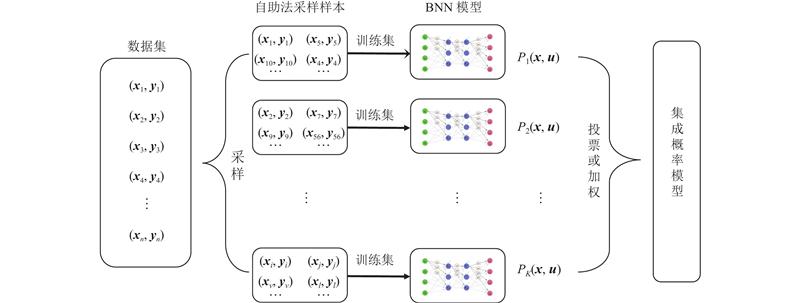
| 图 4 集成概率模型的训练过程 |
| Fig.4 Training process of ensemble probabilistic model |
|
|